S-curve acc/dec, C2-01, S-curve characteristic at accel start – Yaskawa E7L Drive Bypass User Manual
Page 220: Scrv acc @ start, Command, 00 to, 20sec, Programming, C2-02, S-curve characteristic at accel end
Parameters A - 8
S-Curve Acc/Dec
C2-01
S-Curve Characteristic at
Accel Start
SCrv Acc @ Start
0.00 to
2.50
0.20sec
Programming
C2-02
S-Curve Characteristic at
Accel End
SCrv Acc @ End
0.00 to 2.50
0.20sec
Programming
Torque Comp
C4-01
Torque Compensation Gain
Torq Comp Gain
This parameter helps to produce better starting torque. It
determines the amount of torque or voltage boost based upon
motor current and motor resistance.
0.00 to 2.50
1.00
Programming
C4-02
Torque Compensation
Primary Delay Time
Torq Comp Time
This parameter adjusts a filter on the output of the torque
compensation function. Increase to add torque stability, decrease
to improve torque response.
0 to 10000
200ms
Programming
Carrier Freq
C6-01
Normal Duty Selection
Normal Duty Sel
1: Normal Duty 1
2: Normal Duty 2
1 or 2
2
Programming
C6-02
Carrier Frequency Selection
CarrierFreq Sel
Carrier frequency sets the number of pulses per second of the out-
put voltage waveform.
0: Low Noise (Carrier frequency is randomly moduled for lower
audible noise)
1: Fc = 2.0 kHz
2: Fc = 5.0 kHz
3: Fc = 8.0 kHz
4: Fc = 10.0 kHz
5: Fc = 12.5 kHz
6: Fc = 15.0 kHz
F: Program (Determined by the settings of C6-03 thru C6-05)
0 to F
kVA
Dependent
Programming
C6-03
Carrier Frequency Upper
Limit
CarrierFreq Max
Maximum carrier frequency allowed when C6-02 = F.
0.4 to 15.0
kHz
kVA
Dependent
Programming
C6-04
Carrier Frequency Lower
Limit
CarrierFreq Min
Minimum carrier frequency allowed when C6-02 = F.
0.4 to 15.0
kHz
kVA
Dependent
Programming
C6-05
Carrier Frequency Propor-
tional Gain
CarrierFreq Gain
Sets the relationship of output frequency to carrier frequency when
C6-02 = F.
0 to 99
0
Programming
Preset Reference (Speeds)
d1-01
Frequency Reference 1
Reference 1
Digital preset speed command 1. Used when b1-01 = 0 and when
in "hand" mode. Setting units are affected by o1-03.
0.00 to
E1-04
Value
0.00Hz
Programming
d1-02
Frequency Reference 2
Reference 2
Digital preset speed command 2. Selected via multi-function input
terminals. Setting units are affected by o1-03.
0.00Hz
Programming
d1-03
Frequency Reference 3
Reference 3
Digital preset speed command 3. Selected via multi-function input
terminals. Setting units are affected by o1-03.
0.00Hz
Programming
d1-04
Frequency Reference 4
Reference 4
Digital preset speed command 4. Selected via multi-function input
terminals. Setting units are affected by o1-03.
0.00Hz
Programming
d1-17
Jog Frequency Reference
Jog Reference
Speed command used when a jog is selected via multi-function
input terminals. Setting units are affected by o1-03.
0.00 to
E1-04
Value
6.00Hz
Programming
Denotes that parameter can be changed when the drive is running.
Table A.1 Parameter List (Continued)
Parameter
No.
Parameter Name
LCD Digital Operator
Display
Description
Setting
Range
Factory
Setting
Menu
Location
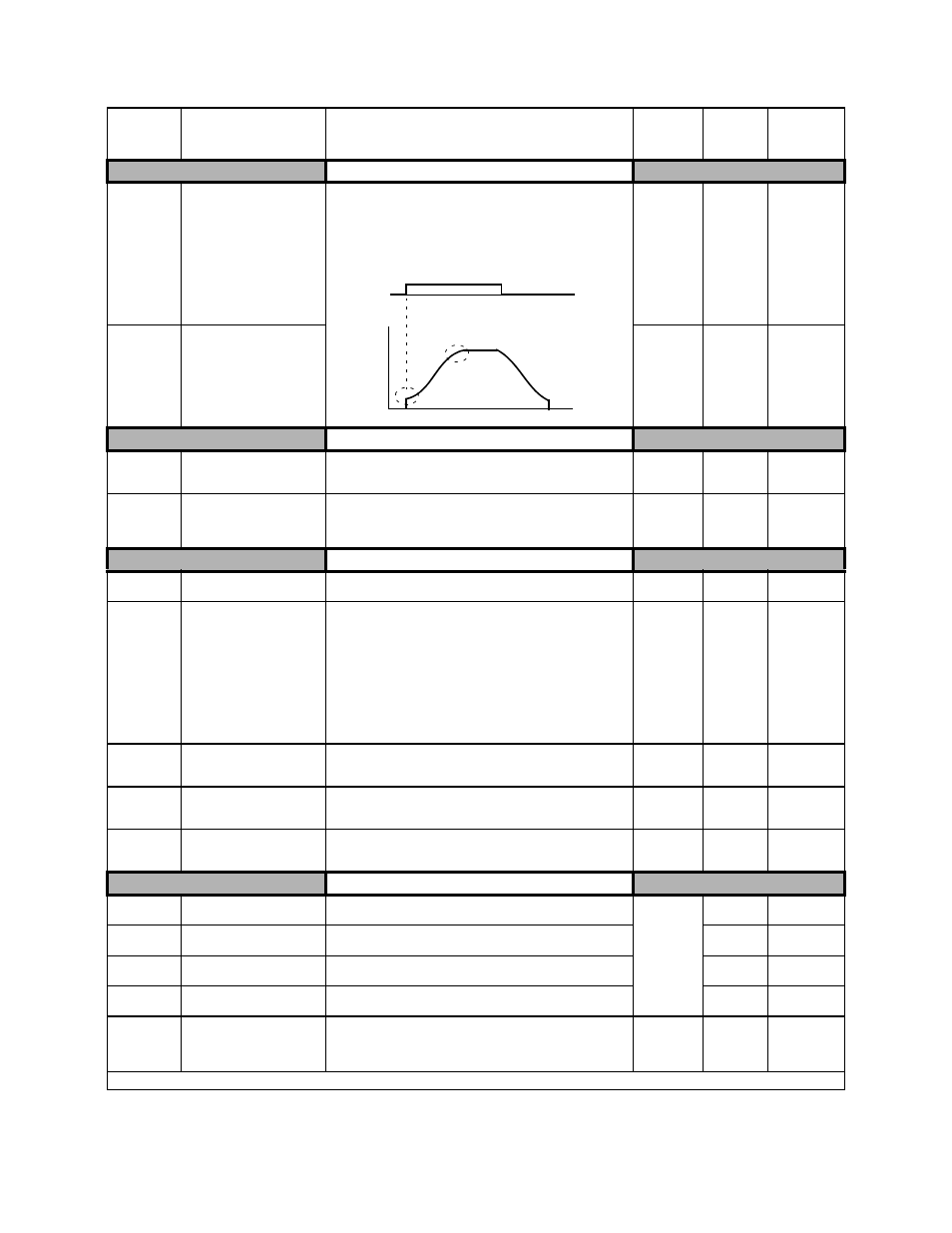
Time
command
Output frequency
ON
C2-02
C2-01
OFF
S-curve is used to further soften the starting ramp.
The longer the S-curve time, the softer the starting
ramp.
Run