H3-09 drive terminal a2 function selection – Yaskawa E7L Drive Bypass User Manual
Page 149
Programming 5 - 57
H3-09 Drive Terminal A2 Function Selection
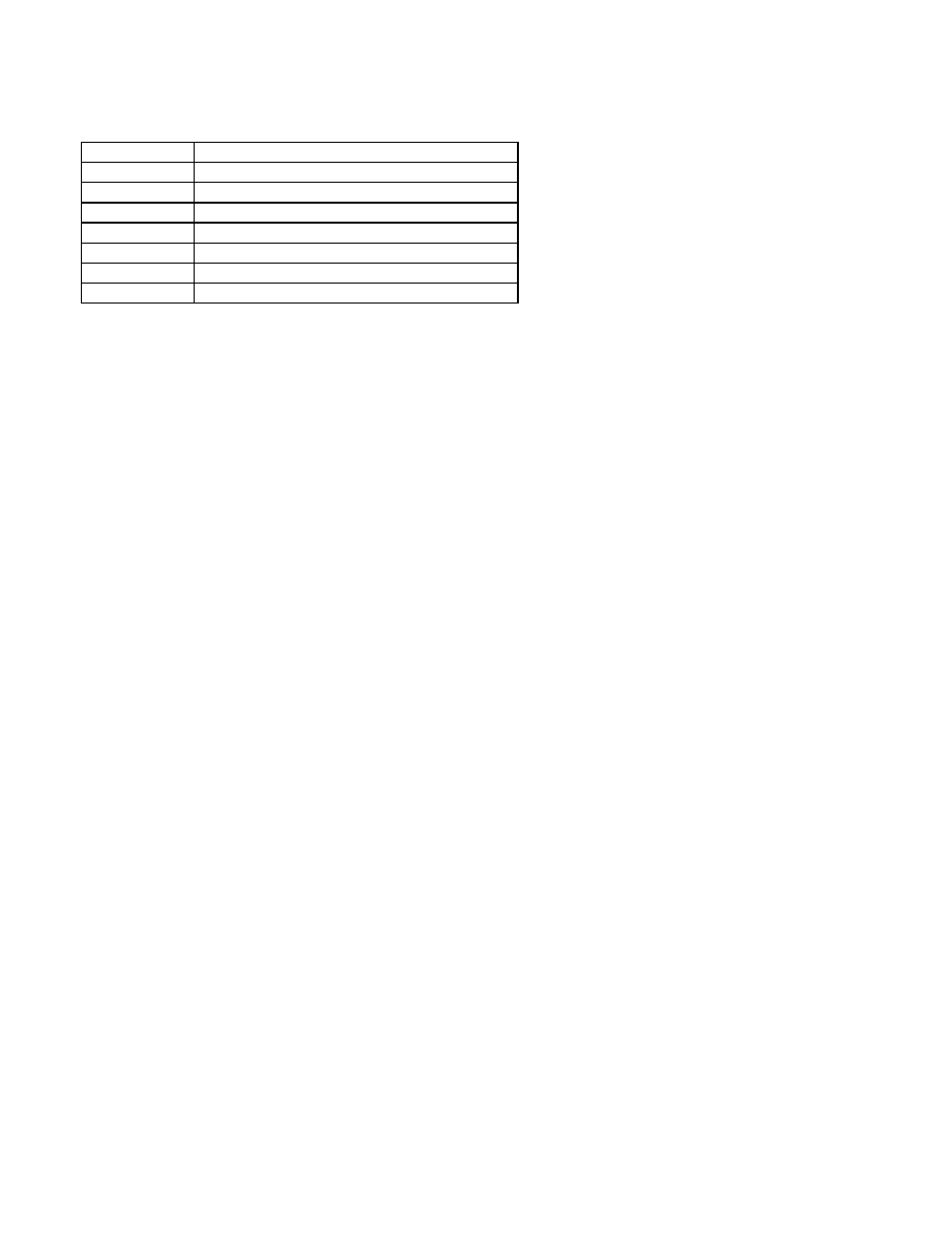
H3-09 is one of the special parameter settings required by the Bypass logic circuit. See Table 5.2.
The Drive A2 analog input (E7L Terminal TB3-3 or TB5-9) can be programmed to perform many different functions. The
setting of parameter H3-09 determines which of the following functions the A2 analog input will perform.
Function: Aux Reference
Setting: 2
In order for the A2 analog input to be used as the master Speed Command, parameter H3-09 must be set for Aux Reference
(H3-09= “2: Aux Reference”). Once A2 is configured as an auxiliary reference, it can be selected as the master Speed
Command by setting H3-13= “1: Main Fref TA2”. If H3-09= 2, terminal A2 analog input will become the speed command
when a digital input programmed for Multi-Step Ref 1 (H1-0x= 3) is selected by a contact closure.
Function: PI Feedback
Setting: B
Configuring the A2 analog input as PI Feedback (H3-09= “B: PI Feedback”) is a requirement of setting the Drive up for PI
operation. The A2 analog input is the only source for feedback for PI operation though the setpoint can come from a number of
different sources (refer to the section covering the PI parameters for more information regarding specifying the setpoint
source. PI parameters are listed in section b5).
Parameters H3-10 (Terminal A2 Gain) and H3-11 (Terminal A2 Bias) can be used to configure the A2 analog input to match
the signal from the Feedback Transmitter.
The U1-24 monitor (PI Feedback) can be used to check the PI Feedback level with the digital operator.
Function: PI Differential
Setting: 16
Normal PI operation will adjust the Drive output in order to match the measured feedback value to a desired setpoint. When PI
is operated in the differential mode, however, the Drive output is adjusted in order to maintain a desired differential between
two feedback signals.
When the A2 analog input is configured as a PI Differential (H3-09= “16: PI Differential”), the A1 analog input becomes the
other PI Differential input. The desired differential is set by parameter b5-07 (PI Differential Setpoint) and can be set so that
A2 is held less than A1 (b5-07 <0) or A2 is held greater than A1 (b5-07>0).
When PI Differential operation is chosen, the A1 feedback level can be monitored by U1-24 (PI Feedback) and the A2
feedback level can be monitored by U1-53 (PI Feedback2).
Setting
Description
0
Frequency Bias
2
Aux Reference
B
PI Feedback
D
Frequency Bias 2
E
Motor Temperature
16
PI Differential
1F
Not Used