2 fault detection – Yaskawa J1000 Compact Vector Control Drive User Manual
Page 144
Digital Operator Display
Fault Name
Cycle times are too short during
acceleration and deceleration.
Increase the acceleration and deceleration times (C1-01 through C1-08).
• Drive overloaded at low
speeds.
• Overload may occur at low
speeds when using a general-
purpose motor, even if
operating within the rated
current limitation.
• Reduce the load.
• Increase the speed.
• If the drive is supposed to operate at low speeds, either increase the motor
capacity or use a motor specifically designed to operate with the drive.
Although a special type of motor is
being used, the motor protection
selection is set for a general-
purpose motor (L1-01 = 1).
Set L1-01 to 2.
Voltage is too high for the V/f
characteristics.
• Adjust the user set V/f patterns (E1-04 through E1-10). Parameters E1-08 and
E1-10 may need to be reduced.
• If E1-08 and E1-10 are set too high, there may be very little load tolerance at
low speed.
The wrong motor-rated current is
set to E2-01.
• Check the motor-rated current.
• Enter the value written on the motor nameplate to parameter E2-01.
The motor base frequency for the
drive input power is set too low.
• Check the rated frequency indicated on the motor nameplate.
• Enter the rated frequency to E1-06 (Base Frequency).
Multiple motors are running off the
same drive.
Set L1-01 to 0 to disable the Motor Protection function and install a thermal relay
to each motor.
The electrical thermal protection
characteristics and motor overload
characteristics do not match.
• Check the motor characteristics.
• Correct the value set to L1-01 (Motor Protection Function).
• Install an external thermal relay.
The electrical thermal relay is
operating at the wrong level.
• Check the current rating listed on the motor nameplate.
• Check the value set for the motor-rated current (E2-01).
Motor overheated by
overexcitation operation.
• Overexcitation increases the motor losses and the motor temperature. If applied
too long, motor damage can occur. Prevent excessive overexcitation operation
or apply proper cooling to the motor
• Reduce the excitation deceleration gain (n3-13).
• Set L3-04 (Stall Prevention during Deceleration) to a value other than 4.
Speed Search related parameters
are not set to the proper values.
• Check values set to Speed Search related parameters.
• Adjust the Speed Search current and Speed Search deceleration times (b3-02
and b3-03 respectively).
• After Auto-Tuning, enable Speed Estimation Type Search (b3-24 = “1”).
Output current fluctuation due to
input phase loss
Check the power supply for phase loss.
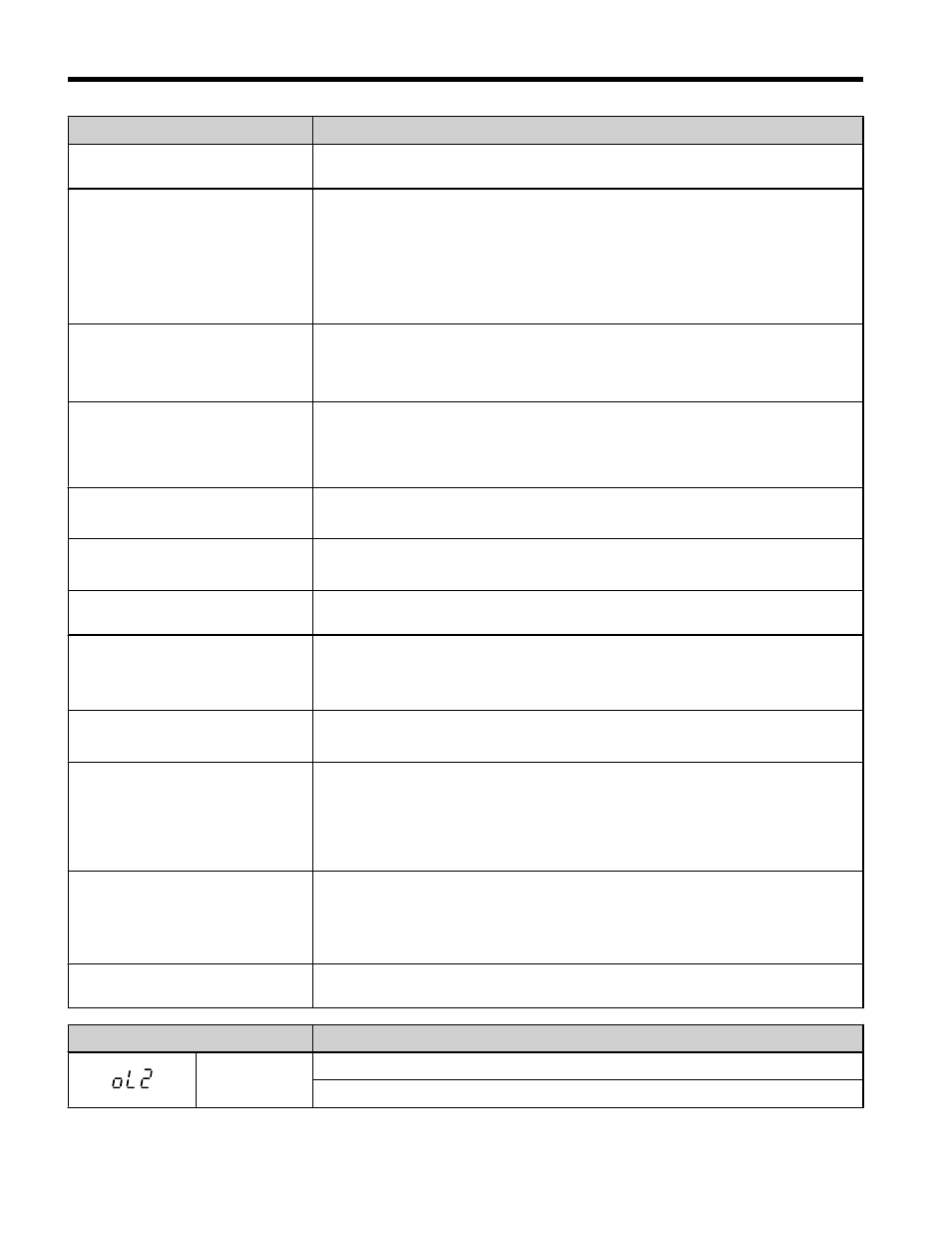
Digital Operator Display
Fault Name
oL2
Drive Overload
The thermal sensor of the drive triggered overload protection.
5.2 Fault Detection
144
YASKAWA ELECTRIC TOEP C710606 47C YASKAWA AC Drive – V1000 Quick Start Guide