B.1 parameter table – Yaskawa J1000 Compact Vector Control Drive User Manual
Page 191
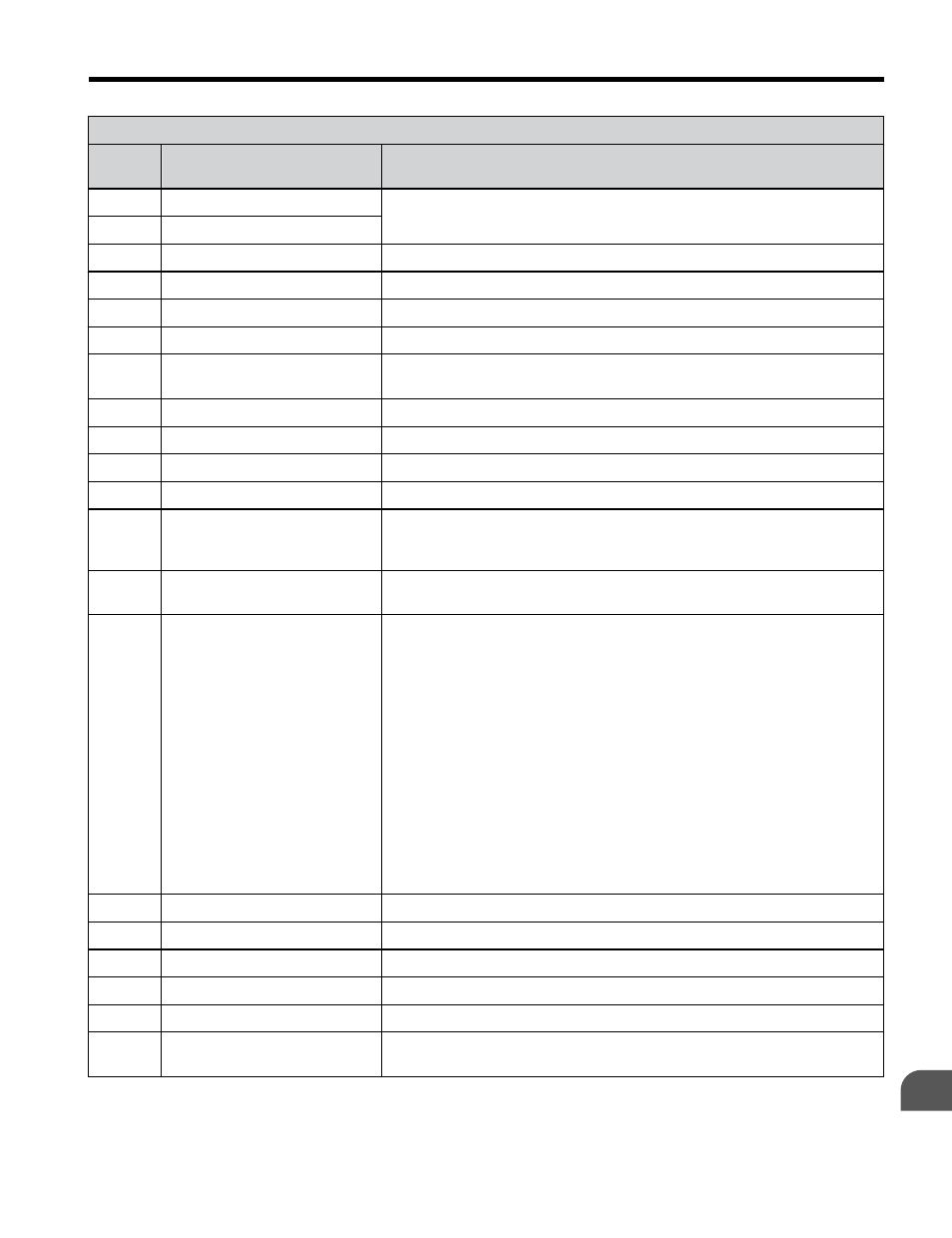
H1 Multi-Function Digital Input Selections
H1-
Setting
Function
Description
10
Up Command
Open: Maintains the current frequency reference
Closed: Increases or decreases the current frequency reference
11
Down Command
12
Forward Jog
Closed: Runs forward at the Jog Frequency d1-17.
13
Reverse Jog
Closed: Runs reverse at the Jog Frequency d1-17.
14
Fault Reset
Closed: Resets faults if cause is cleared and Run command removed.
15
Fast-Stop (N.O.)
Closed: Decelerates at the Fast-Stop time C1-09.
16
Motor 2 Selection
Open: Motor 1 (E1-, E2-)
Closed: Motor 2 (E3-, E4-)
17
Fast-stop (N.C.)
Open: Decelerates according to C1-09 (Fast-stop Time)
18
Timer Input Function
Set the timer delay using parameters b4-01 and b4-02.
19
PID Disable
Closed: PID control disabled
1A
Accel/Decel Time Selection 2 Switches Accel/Decel times.
1B
Program Lockout
Open: Parameters cannot be edited. (except U1-01 if reference source is
set for operator)
Closed: Parameters may be edited and saved.
1E
Reference Sample Hold
Closed: Samples the analog frequency reference and operates the drive at
that speed.
20 to 2F External Fault
20: N.O., Always Detected, Ramp To Stop
21: N.C., Always Detected, Ramp To Stop
22: N.O., During Run, Ramp To Stop
23: N.C., During Run, Ramp To Stop
24: N.O., Always Detected, Coast To Stop
25: N.C., Always Detected, Coast To Stop
26: N.O., During Run, Coast To Stop
27: N.C., During Run, Coast To Stop
28: N.O., Always Detected, Fast-stop
29: N.C., Always Detected, Fast-stop
2A: N.O., During Run, Fast-stop
2B: N.C., During Run, Fast-stop
2C: N.O., Always Detected, Alarm Only (continue running)
2D: N.C., Always Detected, Alarm Only (continue running)
2E: N.O., During Run, Alarm Only (continue running)
2F: N.C., During Run, Alarm Only (continue running)
30
PID Integral Reset
Closed: Resets the PID control integral value.
31
PID Integral Hold
Closed: Maintains the current PID control integral value.
32
Multi-Step Speed Reference 4 Used to select Multi-Step Speeds set in d1-01 to d1-16
34
PID Soft Starter
Closed: Disables the PID soft starter b5-17.
35
PID Input Switch
Closed: Inverses the PID input signal
40
Forward Run Command
(2-wire sequence)
Open: Stop
Closed: Forward run
B.1 Parameter Table
YASKAWA ELECTRIC TOEP C710606 47C YASKAWA AC Drive – V1000 Quick Start Guide
191
B
Parameter List