Def_pos> block fault conditions, Internal fault bit, Cause – Yaskawa MP2000 User Manual
Page 127: Note
TECHNICAL NOTE
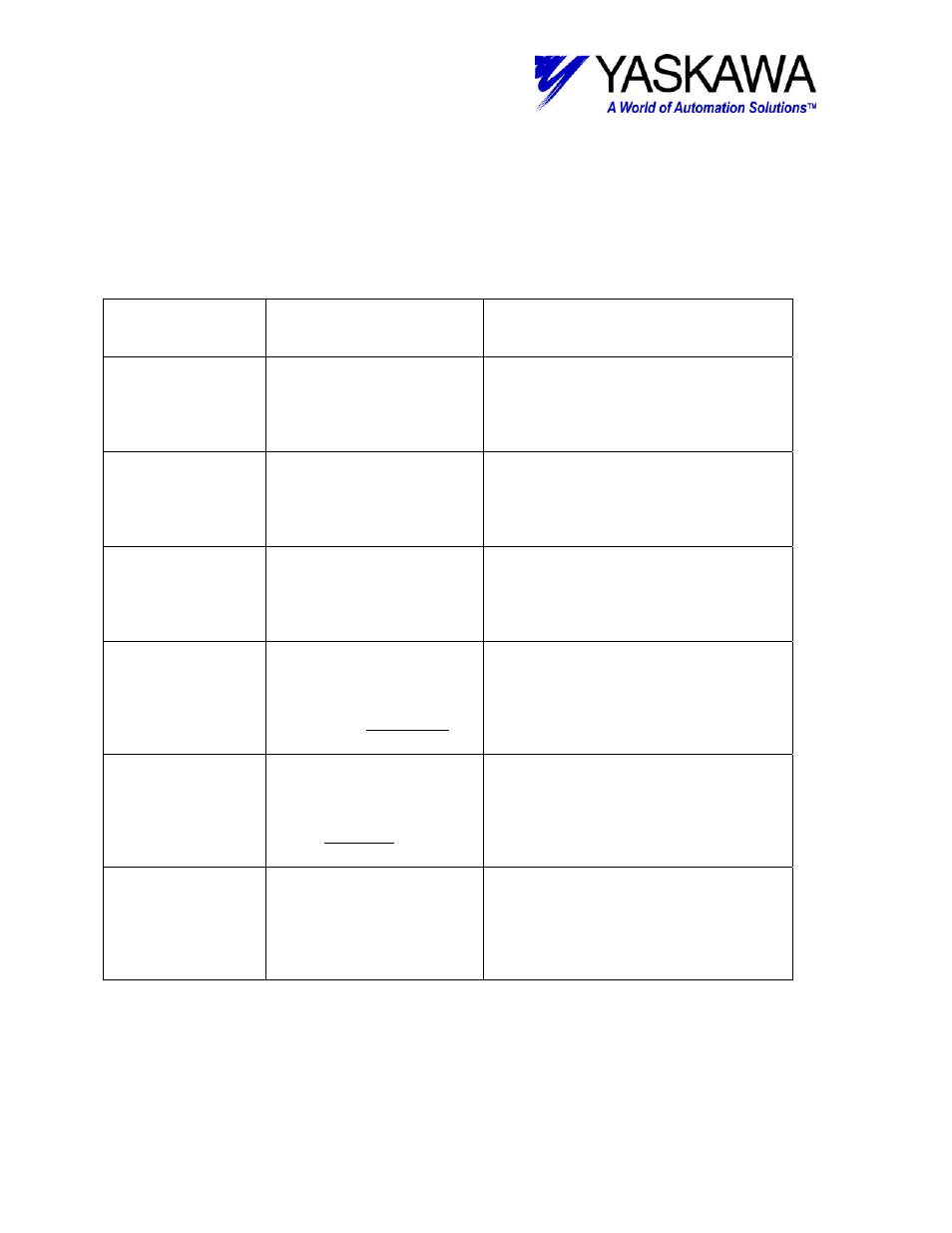
<DEF_POS> Block Fault Conditions:
The following table outlines several situations that may cause an error, and will turn on
the blocks “Error” output bit. The block “Error” output will cleared if the EXECUTE bit
goes low, but the Error ID (MW***81) will remain in the RDA. To reset the Error ID, use
the Alarm Reset Function Block.
Note that each axis has its own Error ID stored in its RDA axis section, offset by 300 for
each axis. Example: Axis#1 stores to MW30181, Axis #2 stores to MW30481, etc.
Internal Fault
Bit
Cause Note
Rotary_ReqPosOK
AB000001
IF this bit is OFF, when
EXECUTE transitioned from
OFF -> ON., an error will
occur. REQPOSIT is outside
range.
See note above for the “REQPOSIT input.)
IN_RDA_RANGE
AB000007
IF this bit is OFF, when
EXECUTE transitioned from
OFF -> ON., an error will
occur. Axis number is
outside range.
See above note for the “AXIS” input.
No_Alarms
AB000008
IF this bit is OFF, when
EXECUTE transitioned from
OFF -> ON, an error will
occur. The axis was in an
error or had an Alarm.
This bit Monitors RDA MLxxx12 (ILxx04)
No_MCC_Requeste
d
AB000009
IF this bit is OFF, when
EXECUTE transitioned from
OFF -> ON, an error will
occur. Motion Command
Code (MCC) in execution
was other than Zero (NOP).
This is determined by monitoring the Motion
Command Code response register (IWxx08) for
Zero.
No_MCC_InQue
AB00000A
If was OFF when EXECUTE
transitioned from OFF ->
ON,an error will occur.
Motion Command Code
(MCC) requested was other
than Zero (NOP).
This is determined by monitoring the Motion
Command Code request register (OWxx08) for Zero.
No_OpInQue
AB00000B
If was OFF when EXECUTE
transitioned from OFF ->
ON,an error will occur. The
Axis is BUSY, in HOLD, or
aprevious motion command
FAILED.
This is determined by monitoring specific BITS in the
Motion Command status register (IWxx09). The Bits
are :0, 1, and 3 BUSY, HOLD, and FAILED
respectively.
File: MP2000_IndividualFunctionDocument_RevC 127/168
Doc Number: eng.MCD.05.101
11/17/2005