M) input – Yaskawa MP2000 User Manual
Page 65
TECHNICAL NOTE
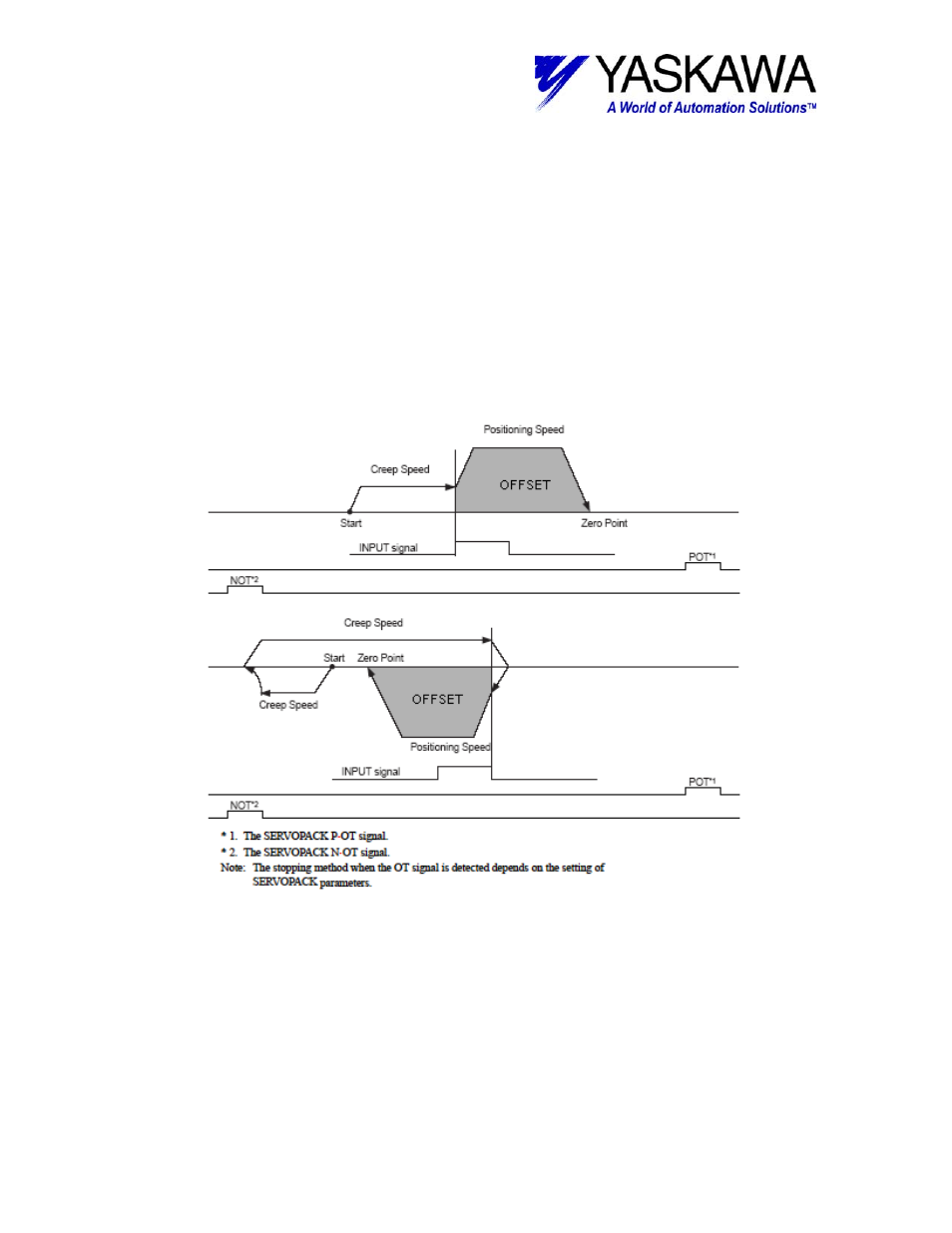
(m) INPUT
The movement starts at the creep speed in the direction of the sign of the creep speed. The final positioning
is performed at the rising edge of the INPUT signal at the positioning speed.
The machine
coordinate system is established with the position to be the HOME
.
The amount of the movement from the rising edge of the INPUT signal is set in the final travel distance of
homing and the positioning speed is set in the rapid feed speed.
OT signal while moving at the creep speed does not cause alarm but the movement is reversed, and looks
for the INPUT signal.
If OT signal is detected while moving at the positioning speed, it becomes OT alarm.
The INPUT signal is set to OBxx05B. A temporary home position can be set for the trial run since no actual
sensor wiring is necessary. Detection of the rising of the INPUT signal is processed by the software.
Therefore, home position can be different by the high-speed scanning setting and the positioning speed.
Please do not use this method if repeatability is necessary for the home position.
INPUT signal must be controlled in the ladder program.
File: MP2000_IndividualFunctionDocument_RevC 65/168
Doc Number: eng.MCD.05.101
11/17/2005