Def_pos> flow chart – Yaskawa MP2000 User Manual
Page 129
Advertising
TECHNICAL NOTE
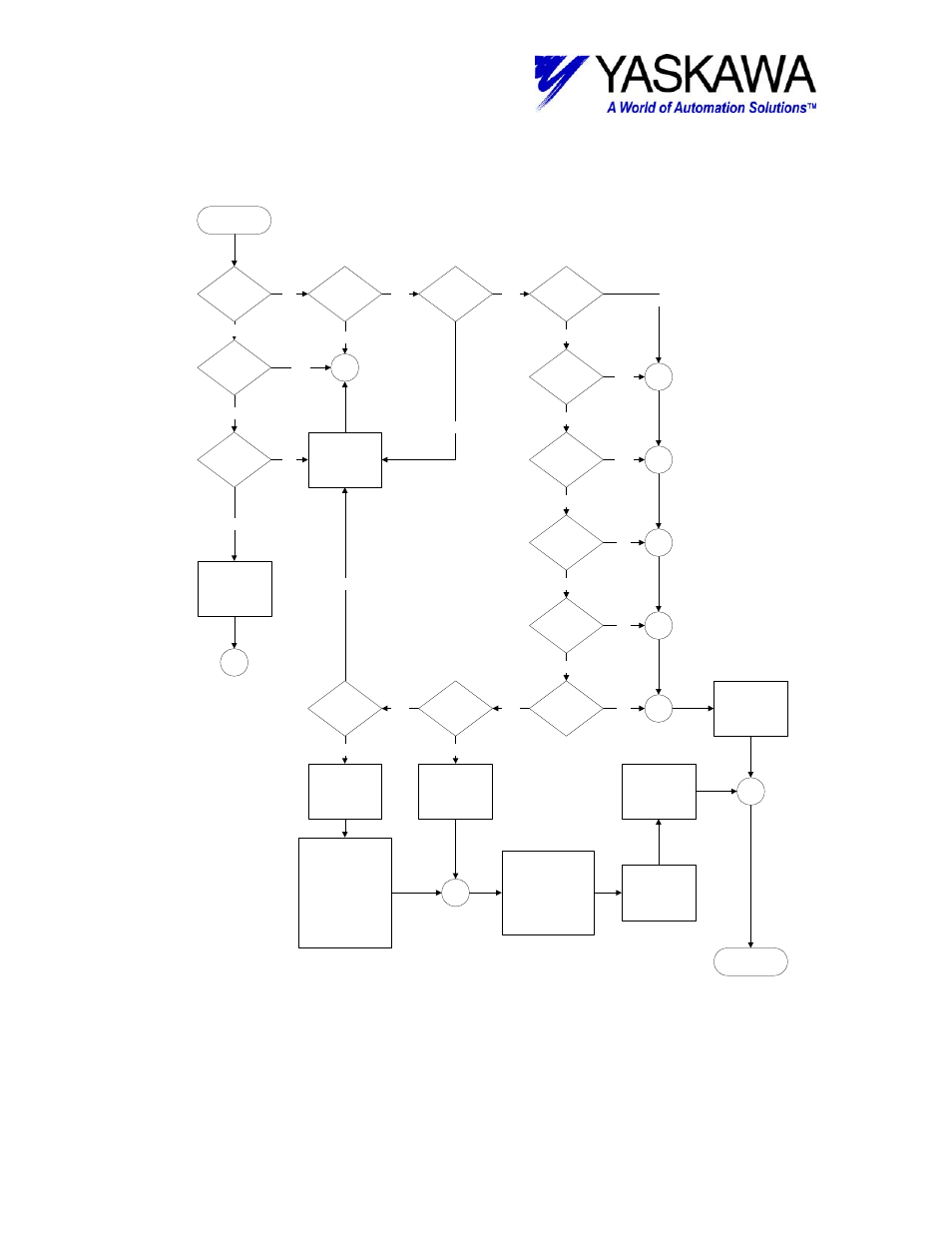
<DEF_POS> Flow Chart
START
FIRST HIGH
SPEED SCAN
ABSOLUTE
ENCODER
SET ABSOLUTE
OFFSET TO
ZERO
END
1
NO
YES
1
NO
YES
EXECUTE
NO
IN RDA
RANGE
YES
SET ERROR
OUTPUT
NO
IN RDA
RANGE
YES
NO
YES
AXIS "BUSY"
AXIS "HOLD"
AXIS "OP
FAIL"
NO AXIS
ALARMS
NO MCC
RESPONCE
NO MCC
REQUEST
YES
YES
NO
NO
NO
NO
YES
YES
YES
YES
NO
NO
AXIS ROTARY
IS
"REQPOSIT"
IN ROTARY
RANGE
NEW OFFSET ==
REQESTED POSITION
-- PRESENT TARGET
POSITION ++
PRESENT OFFSET
POSITION
NO
YES
SET ERROR
OUTPUT
SET RUNNING
OUTPUT
SET RUNNING
OUTPUT
YES
NEW REQUESTED
POSITION ==
PRESENT
REQUESTED
POSITION -
MODULARIZED
POSITION ++
PRESENT LINEAR
POSITION
NO
REST RUNNING
OUTPUT
SET DONE
OUTPUT
1
File: MP2000_IndividualFunctionDocument_RevC 129/168
Doc Number: eng.MCD.05.101
11/17/2005
Advertising
See also other documents in the category Yaskawa Equipment:
- Tag Generator (30 pages)
- MP3300iec (82 pages)
- 1000 Hz High Frequency (18 pages)
- 1000 Series (7 pages)
- PS-A10LB (39 pages)
- iQpump Micro User Manual (300 pages)
- 1000 Series Drive Option - Digital Input (30 pages)
- 1000 Series Drive Option - CANopen (39 pages)
- 1000 Series Drive Option - Analog Monitor (27 pages)
- 1000 Series Drive Option - CANopen Technical Manual (37 pages)
- 1000 Series Drive Option - CC-Link (38 pages)
- 1000 Series Drive Option - CC-Link Technical Manual (36 pages)
- 1000 Series Drive Option - DeviceNet (37 pages)
- 1000 Series Drive Option - DeviceNet Technical Manual (81 pages)
- 1000 Series Drive Option - MECHATROLINK-II (32 pages)
- 1000 Series Drive Option - Digital Output (31 pages)
- 1000 Series Drive Option - MECHATROLINK-II Technical Manual (41 pages)
- 1000 Series Drive Option - Profibus-DP (35 pages)
- AC Drive 1000-Series Option PG-RT3 Motor (36 pages)
- Z1000U HVAC MATRIX Drive Quick Start (378 pages)
- 1000 Series Operator Mounting Kit NEMA Type 4X (20 pages)
- 1000 Series Drive Option - Profibus-DP Technical Manual (44 pages)
- CopyUnitManager (38 pages)
- 1000 Series Option - JVOP-182 Remote LED (58 pages)
- 1000 Series Option - PG-X3 Line Driver (31 pages)
- SI-EN3 Technical Manual (68 pages)
- JVOP-181 (22 pages)
- JVOP-181 USB Copy Unit (2 pages)
- SI-EN3 (54 pages)
- SI-ET3 (49 pages)
- MECHATROLINK-III (35 pages)
- EtherNet/IP (50 pages)
- SI-EM3 (51 pages)
- 1000-Series Option PG-E3 Motor Encoder Feedback (33 pages)
- 1000-Series Option SI-EP3 PROFINET (56 pages)
- PROFINET (62 pages)
- AC Drive 1000-Series Option PG-RT3 Motor (45 pages)
- SI-EP3 PROFINET Technical Manual (53 pages)
- A1000 Drive Option - BACnet MS/TP (48 pages)
- 120 Series I/O Modules (308 pages)
- A1000 12-Pulse (92 pages)
- A1000 Drive Software Technical Manual (16 pages)
- A1000 Quick Start (2 pages)
- JUNMA Series AC SERVOMOTOR (1 page)
- A1000 Option DI-101 120 Vac Digital Input Option (24 pages)