J) not & c phase pulse method – Yaskawa MP2000 User Manual
Page 61
TECHNICAL NOTE
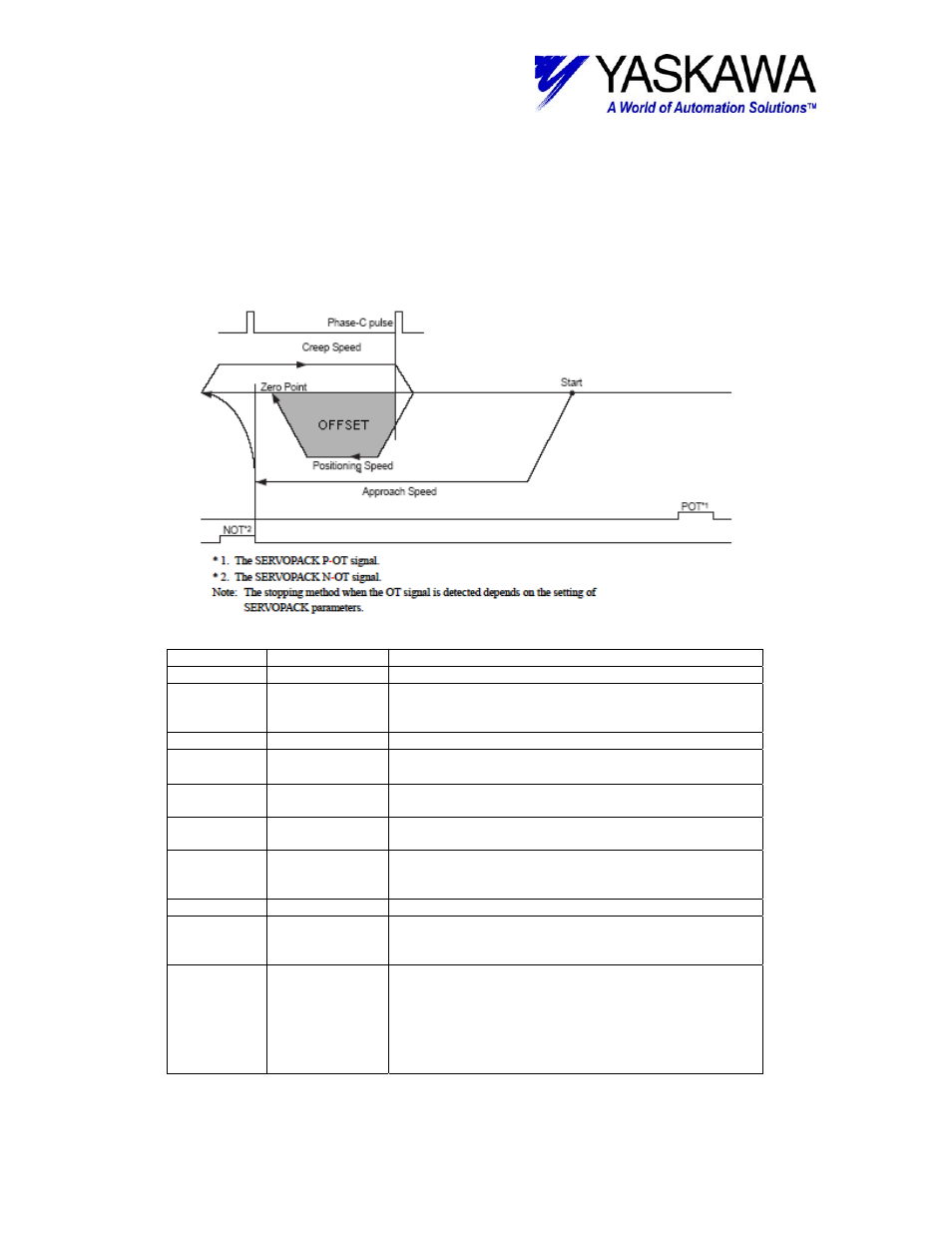
(j) NOT & C phase pulse method
The movement starts at the approach speed, and moves to the stroke limit in a negative direction. When
the NOT signal is detected, the movement is reversed and the speed is changed to the creep speed. When
C phase pulse is detected in reversing after the NOT signal is passed the final positioning is performed.
The machine coordinate system is established with the position to be the HOME
.
The amount of the movement from C phase pulse is set in the final travel distance for homing and the
positioning speed is set in the rapid feed speed.
When the OT signal is detected while moving at the positioning speed, it becomes OT alarm.
Input
Name
Set content
EXECUTE
Execution
Block enable
REVERSE
Direction
selection
The direction of the homing.
0: Seek in forward
1: Seek in reverse
INPUT
INPUT input
Not used
AXIS
Axis setting
Axis number related to the block.
1~16
TYPE
Home position
return method
16: "NOT&C phase pulse" is selected.
TIME
Timer limit
setting
Maximum time to complete the Homing, if timeout then
Error
TRAVSPD
Speed of rapid
feed
Traverse speed in count/second.
0-Max speed (ML3**12)
Moving direction follow the sign of the OFFSET.
APRSPD
Approach speed Not used
CRPSPD
Creep rate
Creep speed in count/second.
0-Max speed (ML3**12)
The movement direction is in positive.
OFFSET
Offset value
Final moving distance. And the position will
be this value. If the value is positive, the
final moving is in the same direction of
homing. If it is negative the final moving will
be in the opposite of homing
File: MP2000_IndividualFunctionDocument_RevC 61/168
Doc Number: eng.MCD.05.101
11/17/2005