Home> block fault conditions – Yaskawa MP2000 User Manual
Page 46
TECHNICAL NOTE
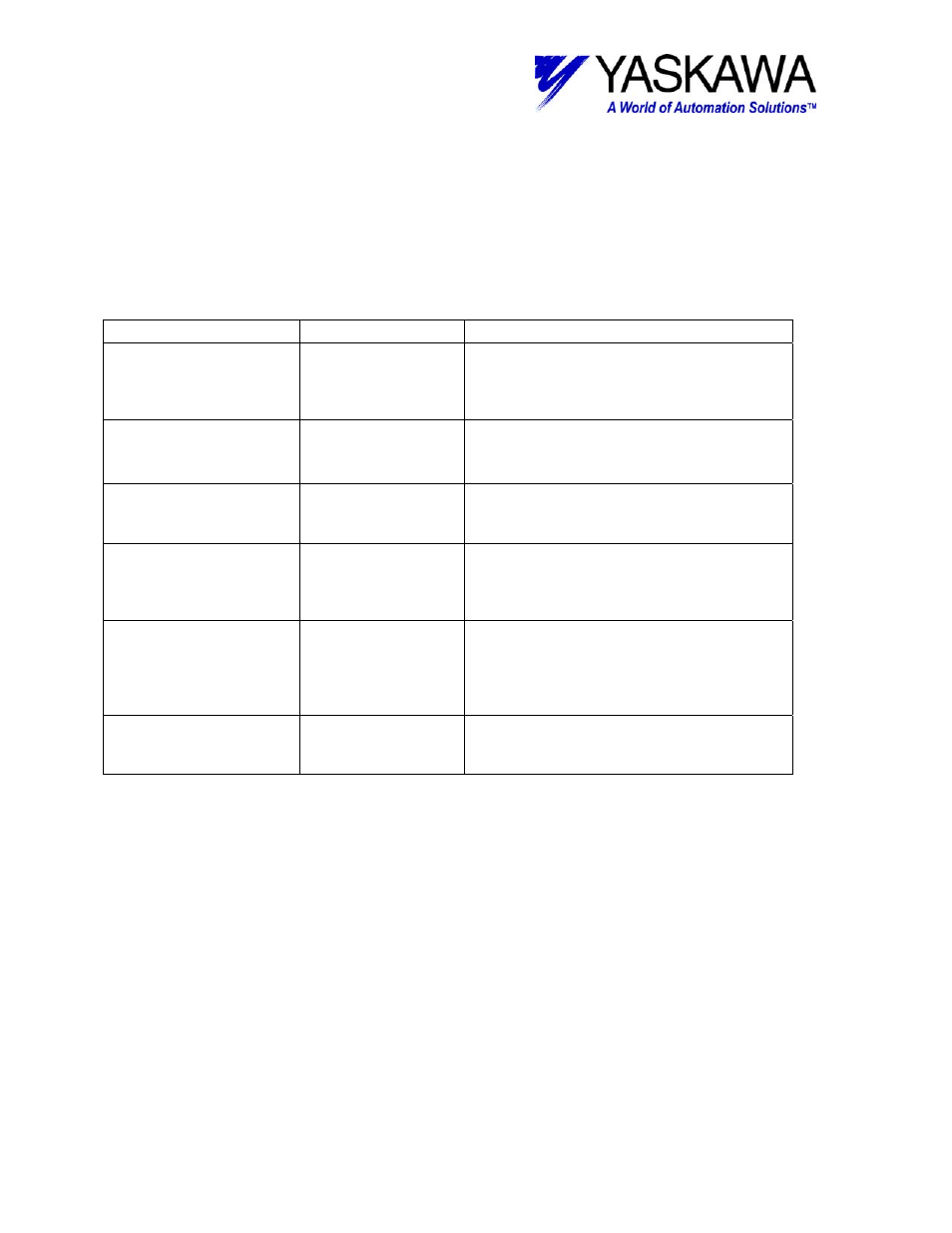
<HOME> Block Fault Conditions:
The following table outlines several situations that may cause an error, and will turn on
the blocks “Error” output bit. The block “Error” output will cleared if the EXECUTE bit
goes low, but the Error ID (MW3**81) will remain in the RDA. To reset the Error ID, use
the Alarm Reset Function Block.
Note that each axis has its own Error ID stored in its RDA axis section, offset by 200 for
each axis. Example: Axis#1 stores to MW30181, Axis #2 stores to MW30281, etc.
Internal error bit
Cause
Attention
axisInErr
AB000006
The axis number
entered on the input
is not an acceptable
value
The function blocks can only control 1 to 16
axes. Any value greater or smaller then this
will cause an error. This does not set the
RDA Error ID.
cmndErr
AB000007
Another block took
control of the axis.
If the block looses control of the axis while
running an error will occur. This does not set
the RDA Error ID.
errStop
AB000008
Motion commanded
and servo is disabled
If block is running and the servo is disabled
the error bit will be set. Sets RDA Error ID
(MW3**81) bit B on if error state exists.
OTAlarm
AB00000C
Over travel Alarm
An over travel bit went low and REVONOT
was FALSE. No home switch was found.
Sets RDA Error ID (MW3**81) bit 0 on if
error state exists.
VEL_ERROR
AB00000D
Either the speed of
rapid feed, approach
speed or creep
speed is not
acceptable value.
Turns on when the set value is not
acceptable. Sets RDA Error ID (MW3**81)
bit 3 on if error state exist.
TimeOver
AB00000F
Time Limit reached
The total time defined by the TIMELIM input
word was exceeded. Sets RDA Error ID
(MW3**81) bit 2 on if error state exists.
File: MP2000_IndividualFunctionDocument_RevC 46/168
Doc Number: eng.MCD.05.101
11/17/2005