Rdainit1> input and output register map – Yaskawa MP2000 User Manual
Page 131
TECHNICAL NOTE
<RDAINIT1> Input and Output Register Map
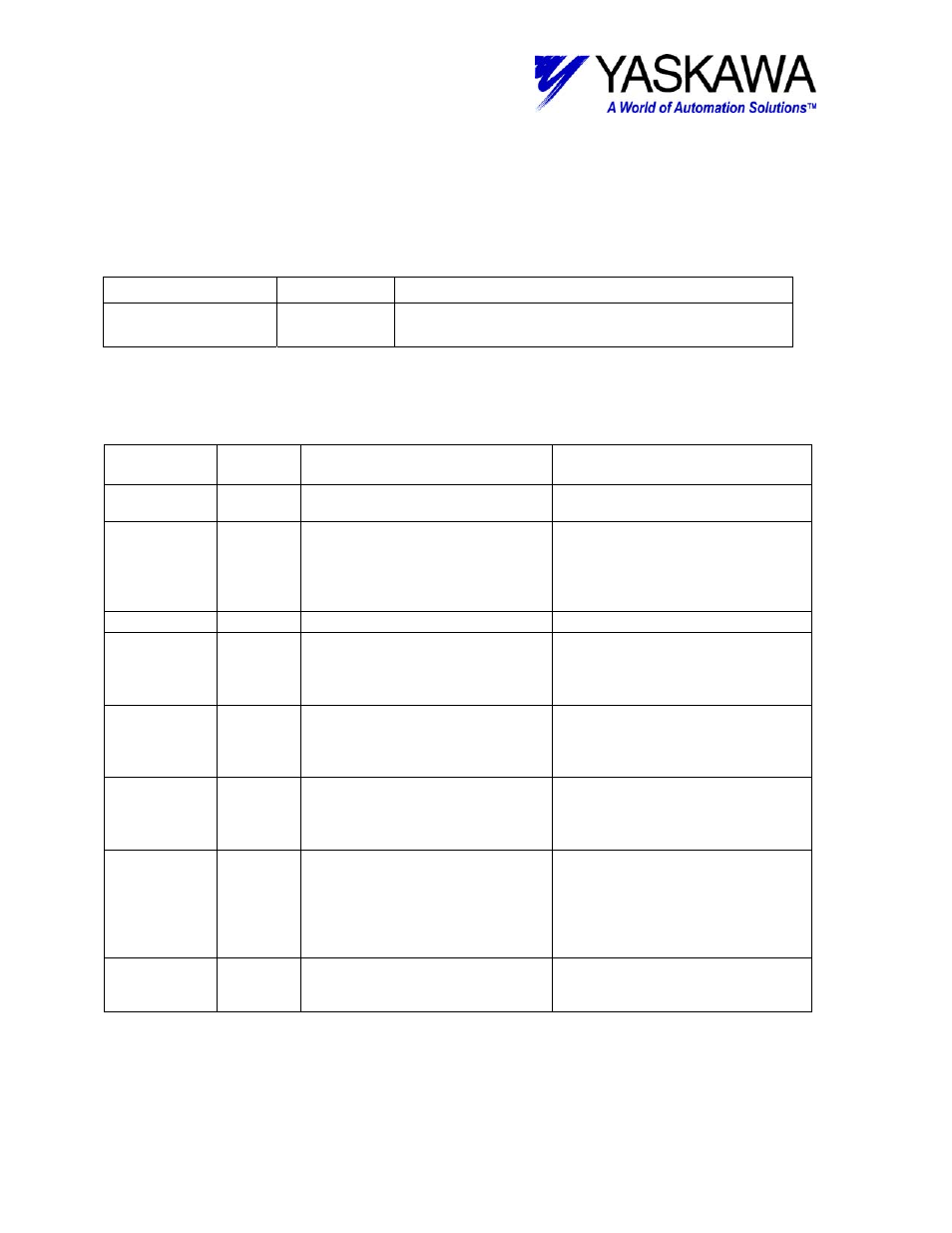
Output Registers
The following registers are used as outputs from the function block. They can be
monitored by the LadderWorks program to check the execution of the function.
Output Type
Description
RUNNING
Bit
Goes high while block is updating RDA.
Updating completes in one scan.
Input Registers
The following registers are used as inputs to the function block. They select the options
and define the parameters that the user needs to make the function work as necessary.
Input
Type
Description
Range and state
LINEAR
Bit
Defines if axis is in linear mode or
rotary mode.
TRUE – axis is linear
FALSE – axis is rotary
HARDOT
Bit
This determines if hard over
travels should be alarmed and
indicated in the RDA. This will
result in SVON block writing to
ErrorID1 (MW3**81)
TRUE – write OT alarm status to
ErrorID1.
FALSE – don’t write OT alarm
status to ErrorID1.
AXISRDA
Word
Axis number related to the block.
1~16
MAXSPEED
Long
Maximum speed the axis is
allowed to travel (counts per
second)
1 to 2147483647. The physical
limitations of the motor and
encoder resolution will make this
number smaller.
MAXACCEL
Long
Maximum acceleration the axis is
allowed to travel (in counts per
second
2)
1 to 2147483647. The physical
limitations of the motor and
encoder resolution will make this
number smaller.
MAXDECEL
Long
Maximum deceleration the axis is
allowed to travel (in counts per
second
2)
1 to 2147483647. The physical
limitations of the motor and
encoder resolution will make this
number smaller.
MAXJERK
Long
More accurately defined as the S-
Curve time in milliseconds. The
greater the number the slower to
ramp to the desired acceleration
or deceleration.
1 to 2147483647. The number
may go down based on scan rate.
The smoothest S-Curve allowed is
255 scans if the scan time is 2
millisec. Then the max time will be
MAXJERK = 510 msec
POSPRIOD
Long
For Rotary mode only. This is the
largest value the axis position can
reach before rolling over to zero.
1 to 2147483647.
File: MP2000_IndividualFunctionDocument_RevC 131/168
Doc Number: eng.MCD.05.101
11/17/2005