Yaskawa MP2000 User Manual
Page 146
TECHNICAL NOTE
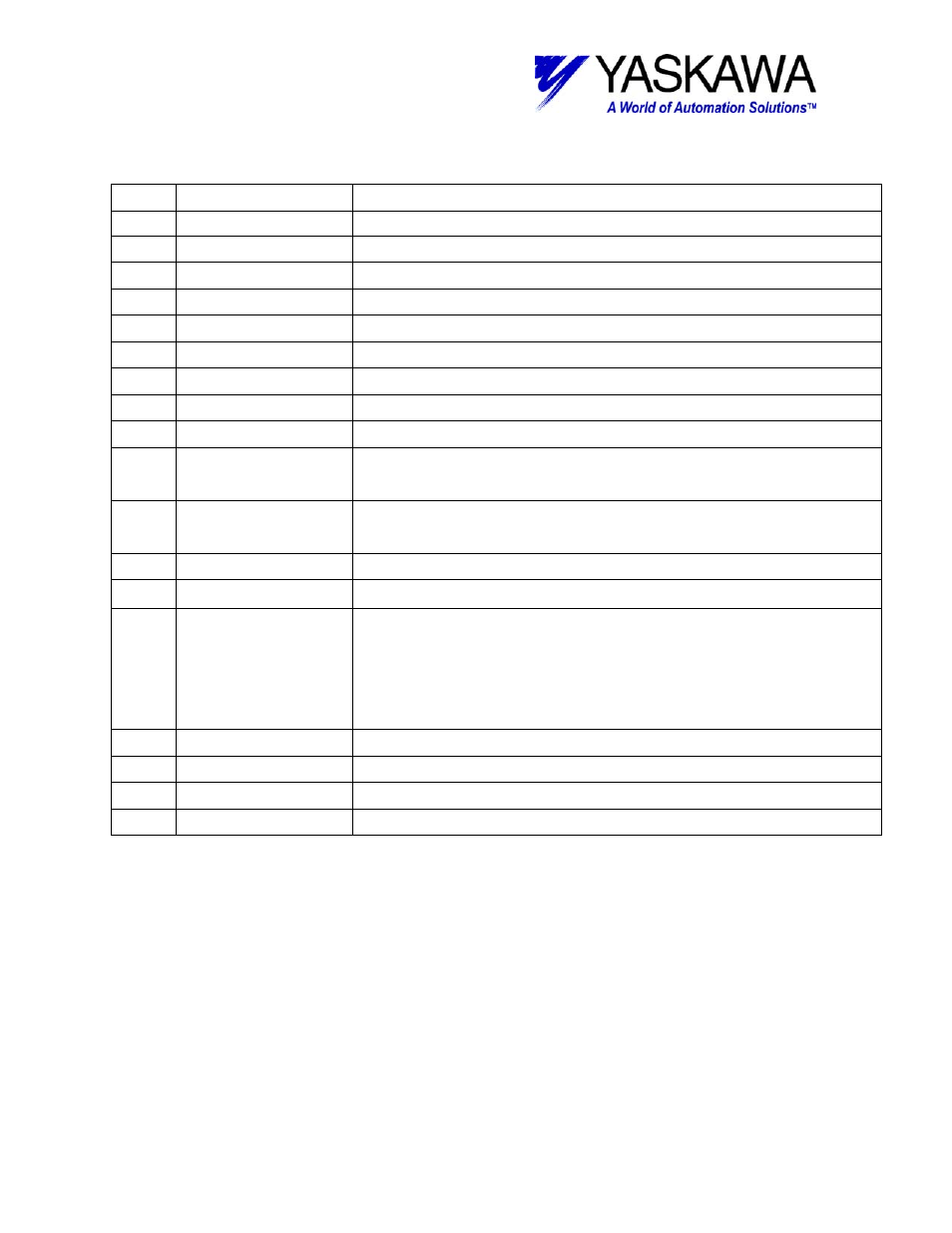
1000 Clear Pending Action
1001 Abort
Stop axis discontinuous motion (RDA#031)
1002 Command Bit
One Scan Pulse of Motion Block Execution
1003 Accelerating
The motion is in acceleration.
1004 Decelerating
The motion is in deceleration.
1005 Steady
?
1006 Ext Pos. Captured
Registration occurred
1033 Motor Rated Speed Rated speed of servo motor [rpm]
1034 Encoder Resolution Servo motor PG post-quad resolution value [pulse/rev] resolution
(
d t
)
1035 Factor FF
Feed Forward gain (1000=100%)
1036 Enable Type
bit0: Servo ON, bit1: Positive Enabled, bit2: Negative Enabled
1037 Move State
The last motion commanded; 0:Stop, 1:MOVVEL, 2:MOVINC,
3:MOVABS, 4:MOVADDTV, 5:HOME, 6:LTCHTGT, 7:GEAR, 8:CAM
1038 Block Running
The last executed Function block Number.
1039 STATUS
Bit0:Running, Bit1:Error, bit2:Interruption
1040 Error ID 1
bit0: No Home Switch, bit1: Over travel, bit2: Time-out, bit3: Value to
Great, bit4: Direction Not Allowed, bit5: Position error, bit6: No
Motor Power, bit7: Servo alarm bit8: Spare, bit9: Track Fail, bitA:
RDA error, bitB: Error stop, bitC: Table error, bitD: Servo off
1041 Error ID 2
Spare
1043 Ext Pos. Captured
Registered position [count]
1044 Module number
Module No
1045 Axis number
Axis No
File: MP2000_IndividualFunctionDocument_RevC 146/168
Doc Number: eng.MCD.05.101
11/17/2005