3 ) programming example – Yaskawa MP900 Series Ladder Programming Manual User Manual
Page 217
5.8 DDC Instructions
5.8.4 PI Control (PI)
5-148
( 3 ) Programming Example
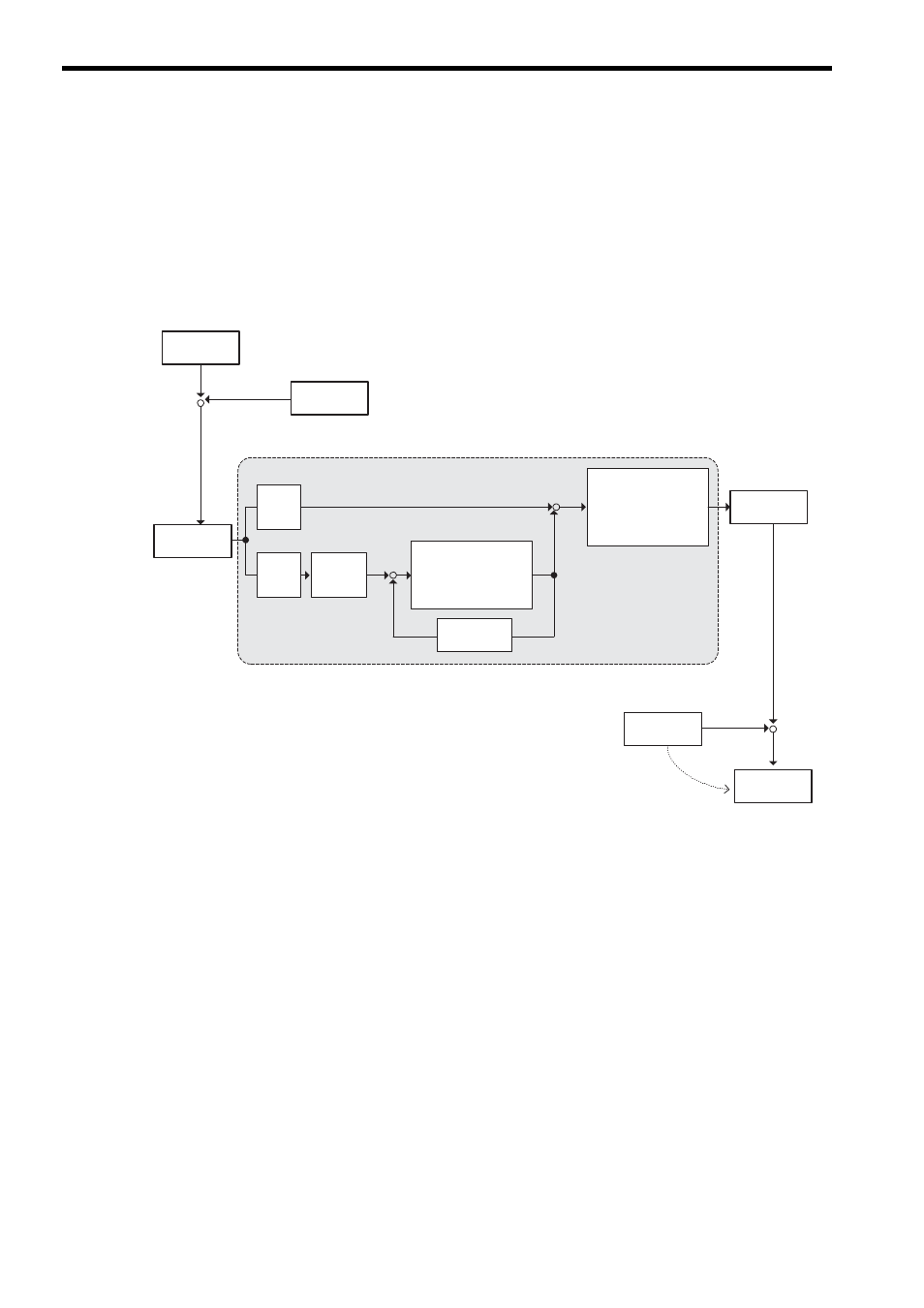
This programming example calculates the reference value in MF00100 weighted with the PI compensation.
The deviation in DF00024 is obtained from the reference value in MF00100 and the current value in MF00098 and it is
used as the input to the PI instruction.
The reference value to output is obtained by adding the original reference value in MF00100 to the PI compensation
output in DF00026.
The following block diagram illustrates the programming example.
• Upper/lower limits
UL = 100, LL =
-
100
• Dead Zone A
DB = 10
Kp = 10
DF00026
DF00024
PI compensation
Deviation
• Upper/lower limits
IUL = 100, ILL =
-
100
Ts/Ti
(Ti = 1.0 s)
Ki = 10
Previous I
compensation
+
+
+
+
MF00100
Reference value
MF00098
Current value (feedback)
PI Instruction
MF00100
MF00100
+
+
+
−
Reference value
Reference value weighted with the compensation