Yaskawa MP900 Series Ladder Programming Manual User Manual
Page 262
5.8 DDC Instructions
5.8.12 Linear Accelerator/Decelerator 2 (SLAU)
5-193
Instructions
5
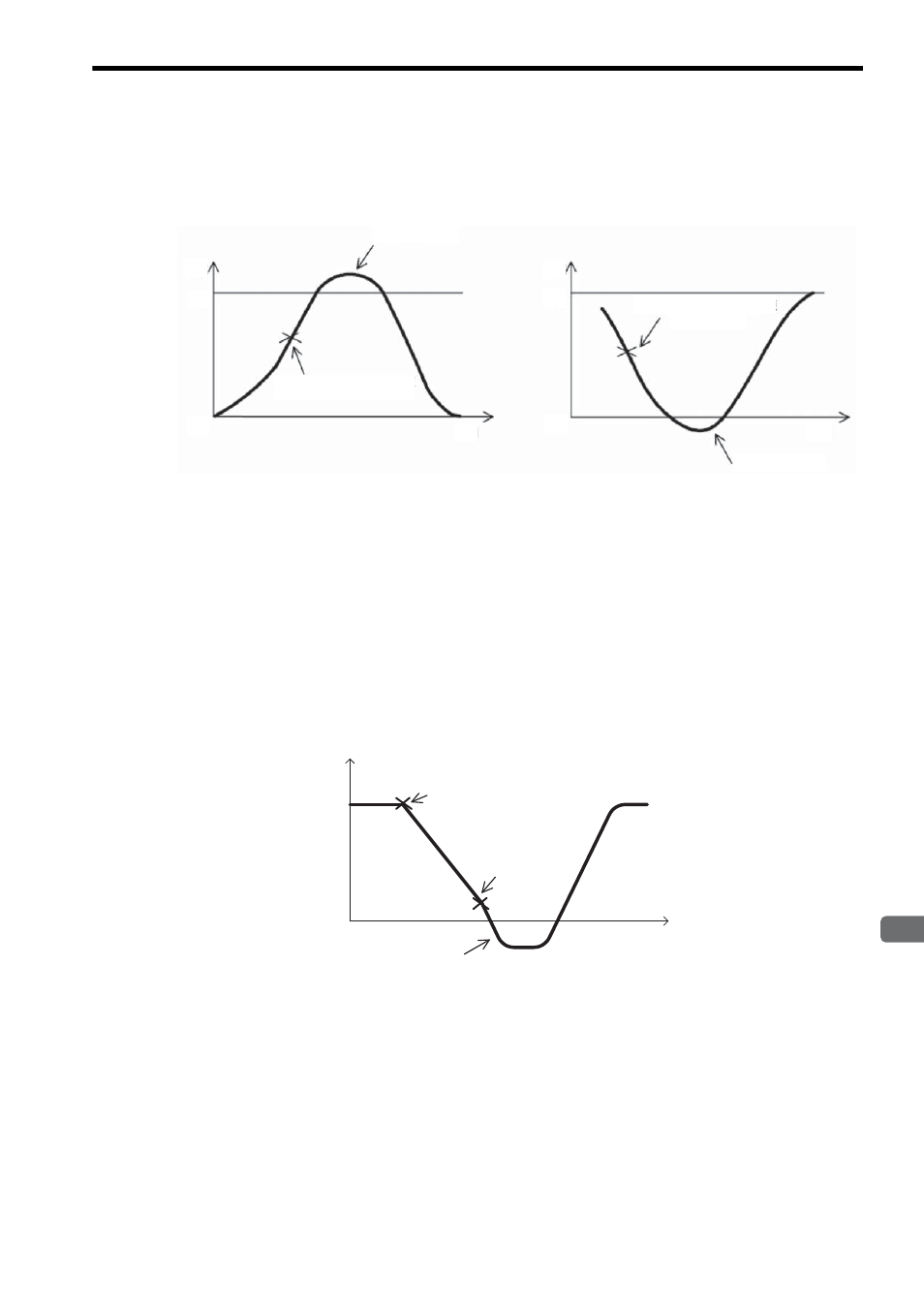
[ c ] Precautions in Using the SLAU Instruction for Integers
Do not change the input value before the input speed (VI) is reached (i.e., during acceleration or deceleration).
Otherwise, overshooting or undershooting may occur as shown in the following figures.
If VI (input value) must be changed while accelerating or decelerating, take one of the following measures in your
application program.
• Use the SLAU instruction for real numbers.
• Use the SLAU instruction for integers together with the LIMIT instruction. Specifically, use the output value of
the SLAU instruction for integers as the input value to the LIMIT instruction to prevent overshooting or under-
shooting.
[ d ] Precaution When Canceling a Quick Stop While Decelerating during a Quick Stop
When decelerating for a quick stop, do not cancel the quick stop before the output speed reaches 0. Otherwise, under-
shooting may occur while approaching the input speed.
If you must reset the quick stop before the output speed reaches 0 and undershooting is a problem, take one of the fol-
lowing measures in your application program.
• Do not cancel the quick stop before the output speed reaches 0.
• Use the LIMIT instruction on the output speed to prevent undershooting when the quick stop is canceled.
Time
Speed
VI
0
Reference input changed
during acceleration
(VI was changed to 0).
Reference input changed
during deceleration
(0 was changed to VI).
Overshoot
Undershoot
Speed
VI
0
Time
Time
Speed
VI
0
Quick stop
Quick stop canceled
before speed is 0.
Undershoot