Typical velocity and position loop system – Hypertherm V9 Series Phoenix Rev.11 User Manual
Page 208
208
Phoenix 9.76.0 Installation and Setup Manual 806410
9 – Motion Control
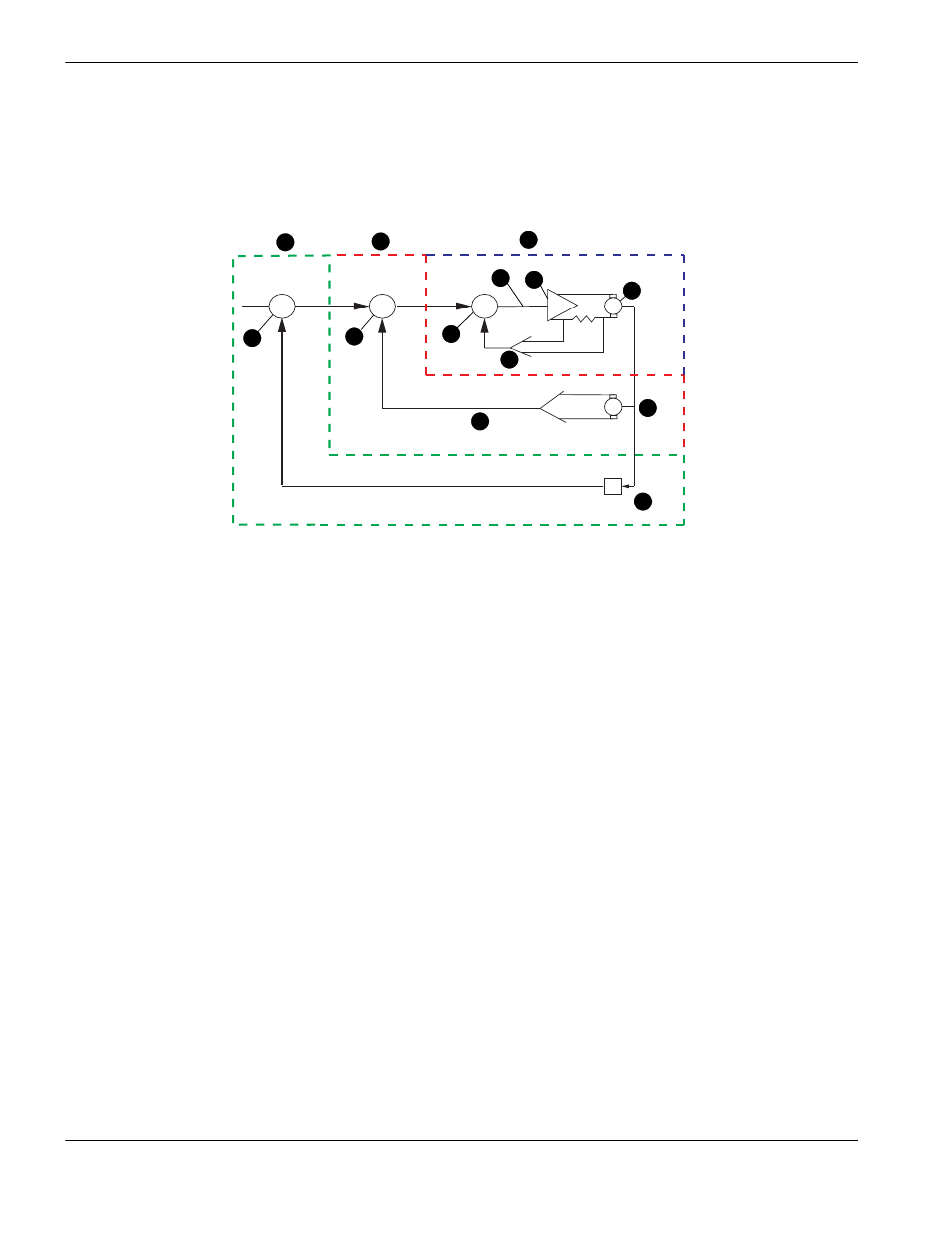
The drawing below outlines a typical velocity and position loop system. The most important aspect for motion control is
the position loop. The process starts with the motion control providing a motion command (voltage) to the motor to move
at a specific speed to a position. Position is tracked during the motion by means of a feedback device, or encoder, that
provides both directional and distance information. Based on this feedback, the CNC adjusts its motion command, or
voltage, to the motor to ensure that the motor is accurately positioned on the designated motion path at the correct
speed.
Typical Velocity and Position Loop System
The motion command starts as digital output within the CNC and is converted to a +/- 10 VDC analog output for use by
the motors. This conversion of the motion command within the control is referred to as the digital to analog converter
(DAC) output and is performed by the motion control card. After the analog output leaves the control, it travels to a drive
amplifier that increases the voltage output to the motor and creates motion. Also, there is usually a linear relationship
between the voltage sent and the machine speed. For example, if 10 volts is the maximum machine speed, 5 volts is half
maximum machine speed. Additionally, the polarity of the output (DAC polarity +/-) to the amplifier dictates the direction
of the motor rotation. Typically, this is known as the Velocity command. In most applications and in the following
application description, the feedback device is an encoder.
∑
∑
∑
+
+
+
-
-
-
1
2
3
4
5
7
8
9
10
11
12
13
6
1
Position loop (green)
2
Velocity loop (red)
3
Current loop (blue
4
Position command
5
Velocity command signal
6
Current command or velocity error
7
Current error signal
8
Current amplifier
9
Servo motor
10
Current feedback signal
11
Tachometer
12
Velocity feedback signal
13
Encoder