Yaskawa iQpump Programming Manual User Manual
Page 175
YASKAWA
TM.iQp.02 iQpump Drive Programming Manual
175
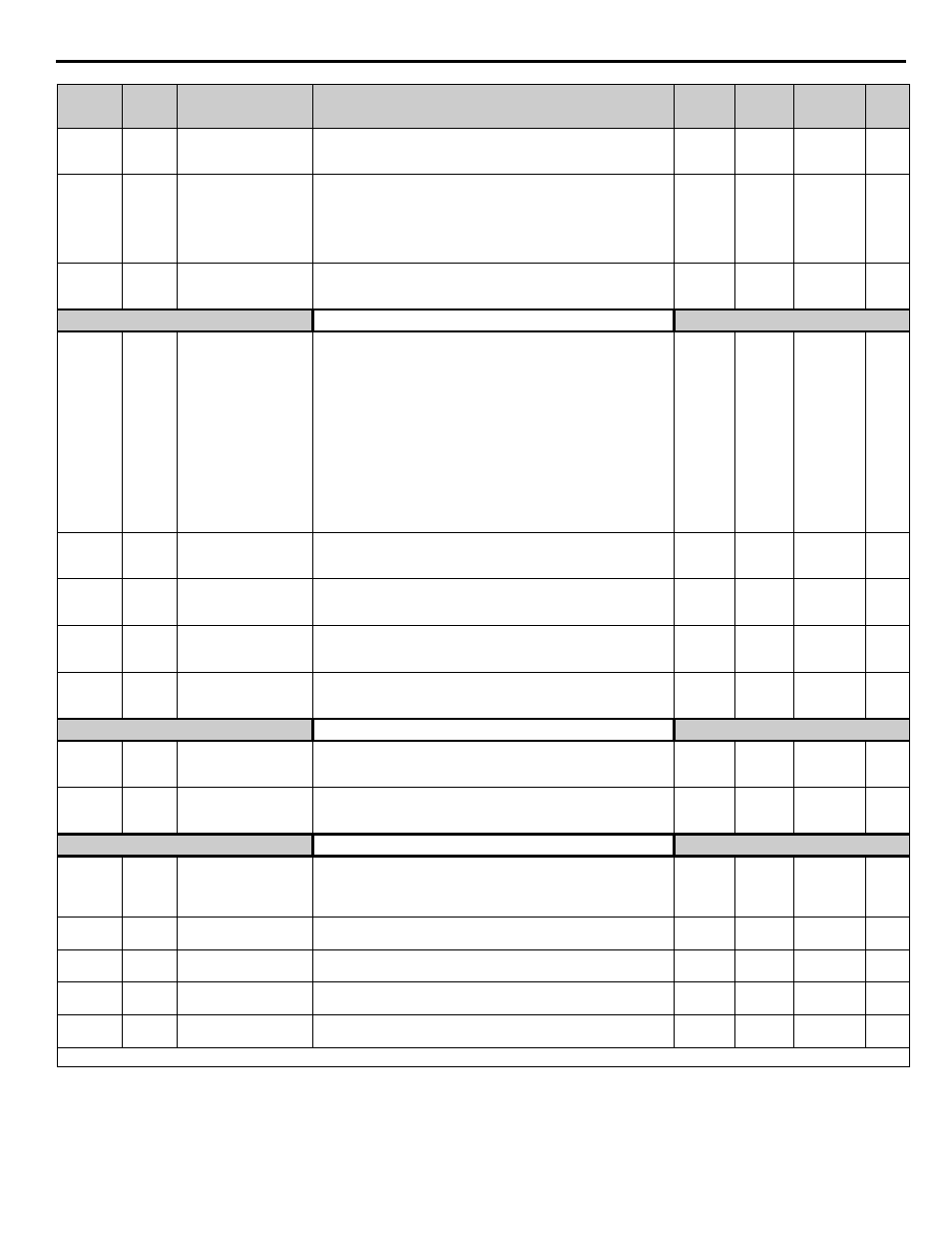
b2-03
018BH
DC Injection Braking
Time at Start
DCInj Time @ Start
Sets the time length of DC injection braking at start in units of 1
second.
0.00 to
10.00
0.00 sec Programming
b2-04
018CH
DC Injection Braking
Time at Stop
DCInj Time @ Stop
When b1-03 = 2 actual DC Injection time is calculated as follows: b2-
04 * 10 * Output Frequency / E1-04. When b1-03 = 0, this parameter
determines the amount of time DC Injection is applied to the motor at
the end of the decel ramp. This should be set to a minimum of 0.50
seconds when using HSB. This will activate DC injection during the
final portion of HSB and help ensure that the motor stops completely.
0.00 to
10.00
0.5 sec
Programming
b2-09
01E1H
Motor Pre-Heat Current
Preheat Current
Motor Pre-heat current in% of Drive rated current. This is used to keep
the motor warm to prevent condensation and is used in conjunction
with a digital input (data = 60).
0 to 100
0%
Programming
Speed Search
b3-01
0191H
Speed Search Selection
SpdSrch at Start
Enables/disables and selects the speed search function at start.
0: SpdsrchF Disable - Speed search at start is disabled (estimated speed
method is used at other times)
1: SpdsrchF Enable - Speed search is enabled (estimated speed
method)
2: SpdsrchI Disable - Speed search at start is disabled (current
detection method is used at other times)
3: SpdscrhI Enable - Speed search is enabled (current detection
method)
Estimated Speed Method: Actual motor speed and direction is
estimated, then the motor is ramped from that speed to the commanded
speed.
Current Detection Method: Current level is monitored while output
frequency is ramped down.
0 to 3
2
Programming
b3-02 0192H
Speed Search
Deactivation Current
SpdSrch Current
Used only when b3-01 = 3. Sets the speed search operation current as a
percentage of Drive rated current.
0 to 200
120%
Programming
b3-03
0193H
Speed Search
Deceleration Time
SpdSrch Dec Time
Used only when b3-01 = 3. Sets the deceleration time during speed
search.
0.1 to 10.0
2.0 sec
Programming
b3-05
0195H
Speed Search Delay
Time
Search Delay
Delays the speed search operation after a momentary power loss to
allow time for an external output contactor to re-energize.
0.0 to 20.0
sec
0.2 sec
Programming
b3-14
019EH
Bidirectional Speed
Search Selection
Bidir Search Sel
0: Disabled
1: Enabled
0 or 1
1
Programming
Delay Timers
b4-01
01A3H
Timer Function ON-
Delay Time
Delay-ON Timer
Used in conjunction with a multi-function digital input and a multi-
function digital output. This sets the amount of time between when the
digital input is closed, and the digital output is energized.
0.0 to
3000.0
0.0 sec
Programming
b4-02
01A4H
Timer Function OFF-
Delay Time
Delay-OFF Timer
Used in conjunction with a multi-function digital input and a multi-
function digital output. This sets the amount of time the output stays
energized after the digital input is opened.
0.0 to
3000.0
0.0 sec
Programming
PI Control
b5-01
01A5H
PI Mode Setting
PI Mode
This parameter enables / disables the closed loop (PI) controller.
0: Disabled
1: Enabled (commanded speed becomes PI setpoint)
3: Fref+PI
0, 1, 3
1
b5-02
01A6H
Proportional Gain Setting
P Gain
Sets the proportional gain of the PI controller.
0.00 to
25.00
2.00
Programming
b5-03
01A7H
Integral Time Setting
PI I Time
Sets the integral time for the PI controller. A setting of zero disables
integral control.
0.0 to
360.0
5.0 sec
Programming
b5-04
01A8H
Integral Limit Setting
PI I Limit
Sets the maximum output possible from the integrator. Set as a% of
fmax.
0.0 to
100.0
100.0% Programming
b5-06
01AAH
PI Output Limit
PI Limit
Sets the maximum output possible from the entire PI controller. Set as
a% of fmax.
0.00 to
100.0
100.0% Programming
Denotes that parameter can be changed when the drive is running. * Menu location is Quick Setting when b5-01=1, and Programming when b5-01=0.
Parameter
No.
Modbus
Address
Parameter Name
Digital Operator
Display
Description
Setting
Range
Factory
Setting
Menu
Location
Page
No.