Yaskawa iQpump Programming Manual User Manual
Page 66
66
YASKAWA
TM.iQp.02 iQpump Drive Programming Manual
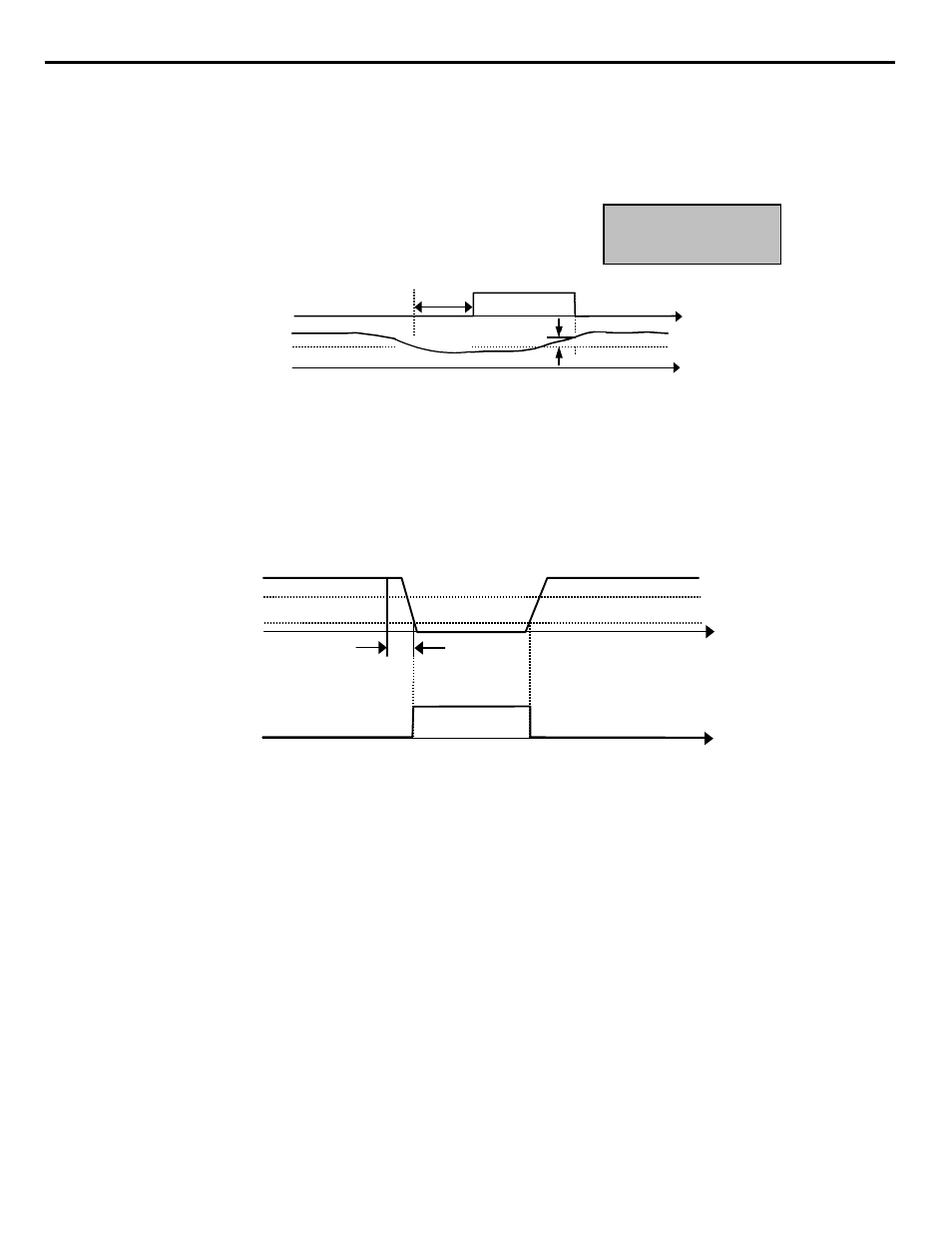
Function: Trq Det 1 N.O. (Setting: B)
The Trq Det 1 function ties a digital output to the overtorque/undertorque sensing capabilities of the Drive. If a digital output is
configured as Trq Det 1 N.O., whenever the output current differs from the level of L6-02 for at least the length of time set in L6-03, the
digital output will close.
The torque detection function has a built-in hysteresis of 10% of the iQpump drive rated output current.
Figure 1.55
Figure 55 Trq Det 1 N.O. Timing Diagram
Function: Loss of Reference (Setting: C)
The Loss of Reference configured digital output will close when the iQpump drive has detected a loss of the analog speed command. The
speed command is considered lost when the voltage level drops 90% in 0.4 seconds. Parameter L4-05 determines the Drive’s reaction to
a loss of reference state in addition to turning on the Loss of Reference digital output.
The Loss of Reference digital output will only initiate if the iQpump drive is configured for the speed command to be via one of the
analog inputs (A1 or A2).
Figure 1.56
Figure 56 Loss of Reference Function Characteristics
Function: Fault (Setting: E)
The Fault configured digital output will close whenever the iQpump drive experiences a major fault with the exception of the CPF00 and
CPF01 (Digital Operator Communications Faults).
Function: Not Used (Setting: F)
The Not Used setting can be used to disable the digital output.
Function: Minor Fault (Setting: 10)
A Minor Fault, also referred to as an alarm, indicates that a condition exists that may be critical to the iQpump drive or application but
does not require the iQpump drive to stop. A minor fault will be flashed on the digital operator but neither the Fault output (MA-MB) nor
any digital output configured as a Fault output (H2-0x = E) will close. Any digital output configured as Minor Fault will close whenever
a minor fault of alarm condition exists.
L6-01 = 5,6,7, or 8
L6-02 = TD Level 1
L6-03 = TD Delay Time 1
b = 10% of Drive rated current
Undertorque Detection
Signal
t
L6-03
L6-02
t
Output Current
b
ON (Closed)
OFF (Open)
TIME
..................
..
.
....
Analog
Speed Command
10%
T
80%
100%
T = 400ms
t
Loss of
Reference
Output
ON (Closed)
OFF (Open)
TIME