Supplementary torque setpoint – Watson-Marlow MM440 User Manual
Page 117
Issue 10/06
3 Functions
MICROMASTER 440 Operating Instructions
6SE6400-5AW00-0BP0
117
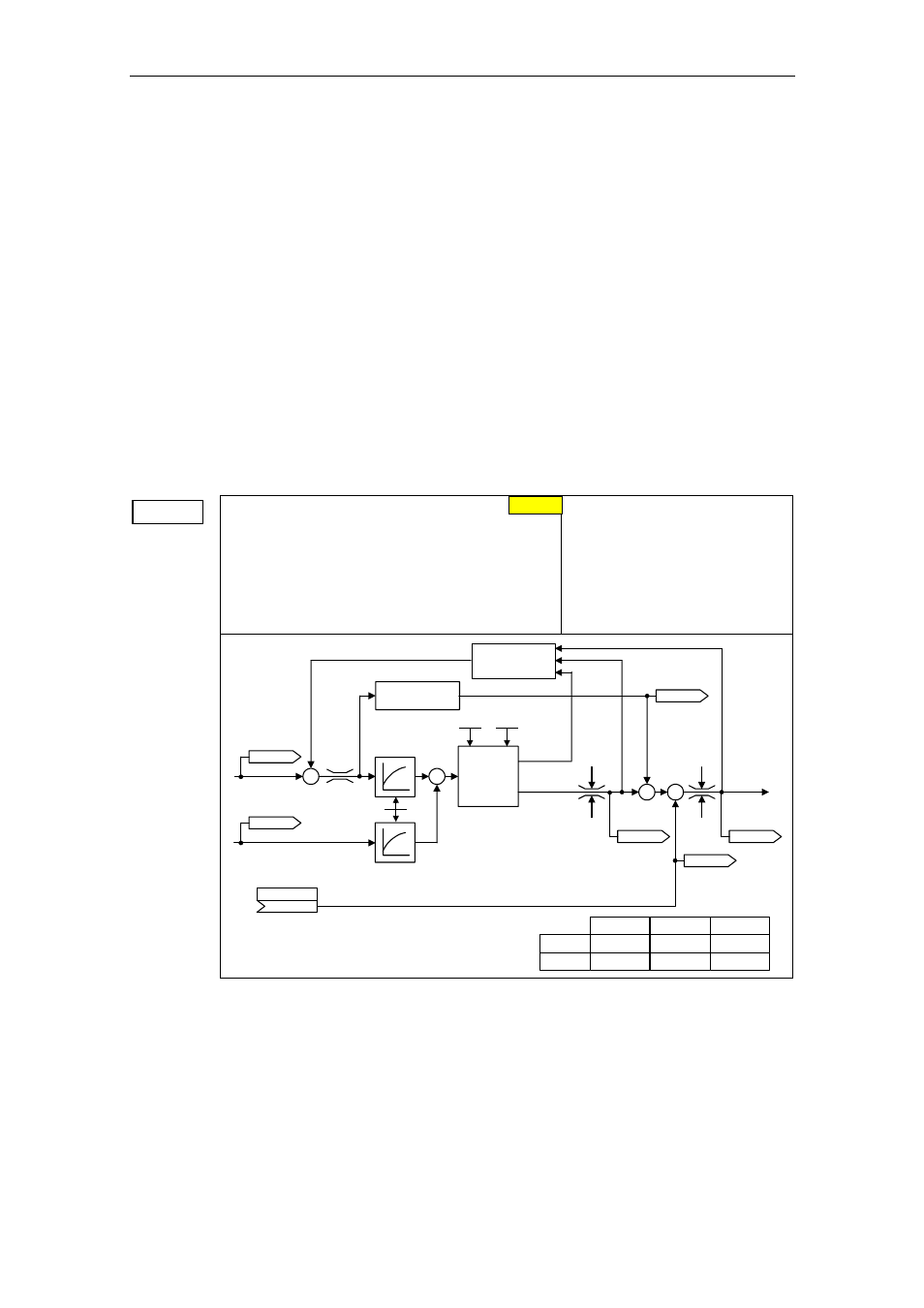
Supplementary torque setpoint
¾
In the vector mode – with / without encoder – the speed controller can be
subordinate to a constant or variable supplementary torque.
¾
The supplementary setpoint can be used to advantage for hoisting gear with low
intrinsic friction when starting in the vertical direction. The supplementary torque
setpoint must always be impressed in the hoisting (raising) direction (please
observe the sign!). As a result of the supplementary torque, also when lowering,
a slip is immediately established that has a stabilizing effect on the closed-loop
control (there is no significant load sag).
¾
The sign of the supplementary torque setpoint can be determined as follows in
the commissioning phase with the appropriate care and taking into account all
of the relevant safety regulations:
Hoist (raise) a minimum load using the hoisting gear and read-out the sign from
parameter r0079 (the sign of r0079 corresponds to the sign of the
supplementary torque setpoint).
¾
An empirical value of approx. 40 % of the rated motor torque r0333 has lead to
good results for existing hoisting gear
(carefully observe the sign!).
CI: Supplementary torque setpoint
Selects the source of the supplementary torque
setpoint.
Frequent settings:
2889 Fixed setpoint 1 as a %
2890 Fixed setpoint 2 as a %
755.0 Analog input 1
755.1 Analog input 2
2015. 2 USS (BOP link)
2018. 2 USS (COM link)
2050. 2 CB (e.g. PROFIBUS)
–
Torque
setpoint
Droop
Act. frequency
–
r1538
r1538
r1539
r1539
CI: Add. trq. setp
(0:0)
P1511.C
Pre-
control
Freq. setpoint
PI
Speed
controller
SLVC:
VC:
P1452
P1442
P1470
P1460
P1472
P1462
T
i
K
p
T
n
T
i
K
p
T
n
*)
*) only active, if pre-control is enabled
(P1496 > 0)
r0079
r1508
r0063
r1170
r1515
r1518
P1511=...
0:0