Watson-Marlow MM440 User Manual
Page 197
Issue 10/06
3 Functions
MICROMASTER 440 Operating Instructions
6SE6400-5AW00-0BP0
197
The motor holding brake is either closed using OFF1 / OFF3 or OFF2. For OFF1 /
OFF3, when the minimum frequency P1080 is reached, the motor is operated at
this frequency until the brake has been applied (closing times of brakes lie between
15 ms and 300 ms). The actual time is specified using parameter P1217 "Holding
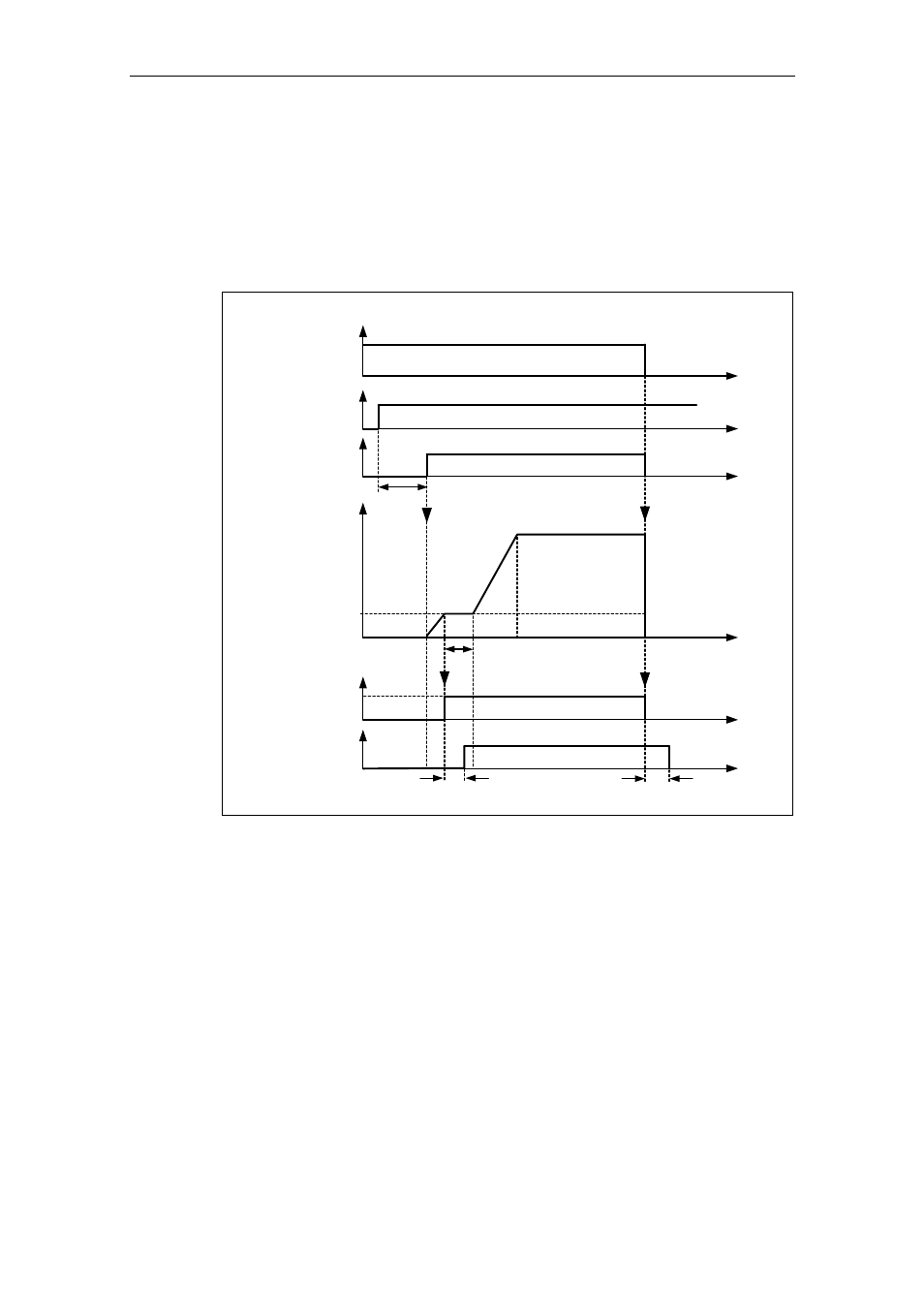
time after ramp down" (refer to Fig. 3-68). If, on the other hand, an OFF2 command
has been output, then independent of the drive state, the status signal r0052 bit 12
"Motor holding brake active" is reset. This means that the brake immediately closes
after OFF2 (refer to Fig. 3-69).
0
fmin
(p1080)
p1216
OFF1/OFF3
ON
ON / OFF2:
1
r0052.C Bit 12
f
p0346
Motor excitation
finished
r0056 Bit04
t
t
t
t
t
t
OFF2
Brake
Status
Brake Release Time
Brake Closing Time
open
closed
Active
Inactive
Fig. 3-69
Motor holding brake after OFF2
The mechanical brake is controlled using the status signal r0052 bit 12 "Motor
holding brake active" of the brake control. This signal can be output as follows:
¾
Via digital outputs
The status signal is output via the digital output. In this case, the internal
MICROMASTER relay (if the specification is sufficient) or also an external
contactor or relay can be used to control the brake.
¾
Via status signal using the serial interface (USS or PROFIBUS)
The master must process the status signal. The signal must be connected to
the digital output of the master to which the contactor / relay for the motor
holding brake is connected.