Watson-Marlow MM440 User Manual
Page 250
3 Functions
Issue 10/06
MICROMASTER 440 Operating Instructions
250
6SE6400-5AW00-0BP0
Speed controller pre-control (P1496, P0341, P0342)
The control behavior of the speed control loop can be improved if the speed
controller of the drive inverter also generates values for the current setpoints
(corresponds to the torque setpoint) from the speed setpoint. This torque setpoint
m
v
, which is calculated as follows
dt
dn
0342
P
0341
P
1496
P
dt
dn
1496
P
m
v
⋅
⋅
⋅
=
⋅
Θ
⋅
=
is entered into the current controller through an adaptation element directly as
additive control quantity (this is enabled using P1496).
The motor moment of inertia P0341 is directly calculated during the quick
commissioning (refer to Section 3.5.8) or the complete parameterization (P0340 =
1, refer to Section 3.5.4). The factor P0342 between the total moment of inertia and
motor moment of inertia must be manually determined.
–
Torque
setpoint
Droop
–
r1538
r1538
r1539
r1539
PI
Speed
controller
r1518
=0
>0
P0341 P0342
P1496
Pre-control
SLVC:
VC:
P1452
P1442
P1470
P1460
P1472
P1462
T
i
K
p
T
n
T
i
K
p
T
n
Freq. setpoint
Act. frequency
r1084
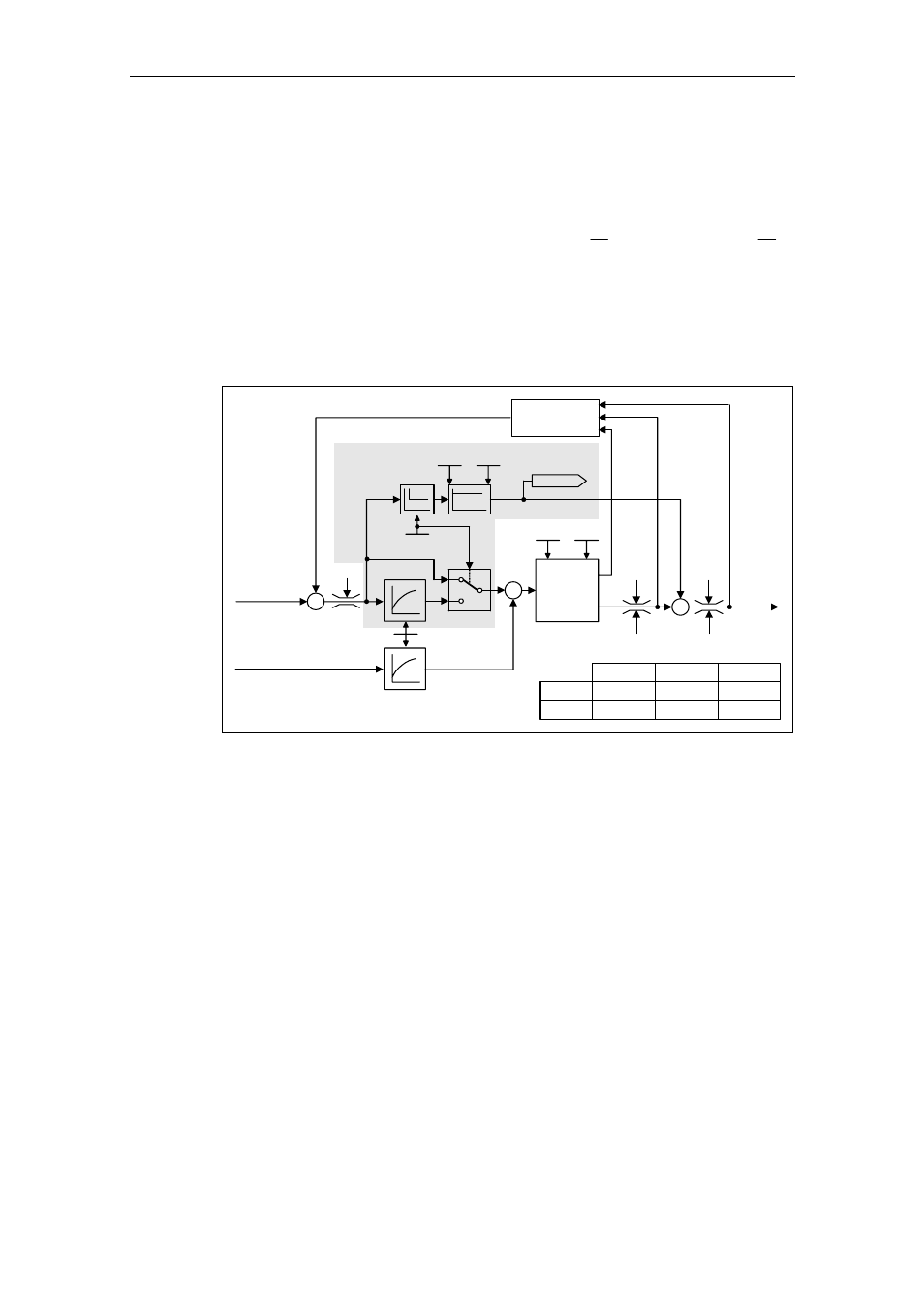
Fig. 3-106
Speed controller with pre-control
When correctly adapted, then the speed controller only has to correct noise
quantities/disturbances in its control loop and this is achieved with a relatively low
manipulated quantity change. On the other hand, speed setpoint changes bypass
the speed controller and are therefore executed faster.
The effect of the pre-control quantity can be adapted, depending on the particular
application, using the pre-control factor P1496. Using P1496 = 100 %, the pre-
control is calculated according to the motor and load moment of inertia (P0341,
P0342). In order that the speed controller does not work against the torque setpoint
which is entered, a balancing filter is automatically used. The time constant of the
balancing filter corresponds to the equivalent delay time of the speed control loop.
The speed controller pre-control is correctly set (P1496 = 100 %, calibration via
P0342), if the I component of the speed controller (r1482) does not change during
a ramp-up or ramp-down in the range n > 20% * P0310. This means, using the pre-
control, it is possible to approach a new speed setpoint without overshoot
(prerequisite: The torque limiting does not intervene and the moment of inertia
remains constant).