Watson-Marlow MM440 User Manual
Page 180
3 Functions
Issue 10/06
MICROMASTER 440 Operating Instructions
180
6SE6400-5AW00-0BP0
NOTE
When selecting the closed-loop dancer roll control it should be noted that neither
PID-MOP nor PID-FF should be used - but instead the MOP (motorized
potentiometer, refer to Section 3.9) or the FF (fixed frequencies, refer to Section
3.7).
MOP
ADC
PID
SUM
PID
FF
USS
BOP link
USS
COM link
CB
COM link
ADC2
P2254
P2253
PID
RFG
PID
PT1
−∆
PID
P2200
P2264
PID
PT1
PID
SCL
&
P2251
= 1
Output
PID
0
1
Motor
control
P
2257
P
2258
P
2261
P2271
P
2269
P
2270
P2265
P
2280
P
2285
0
SUM
P1070
P1075
AFM
P
1120
P
1121
RFG
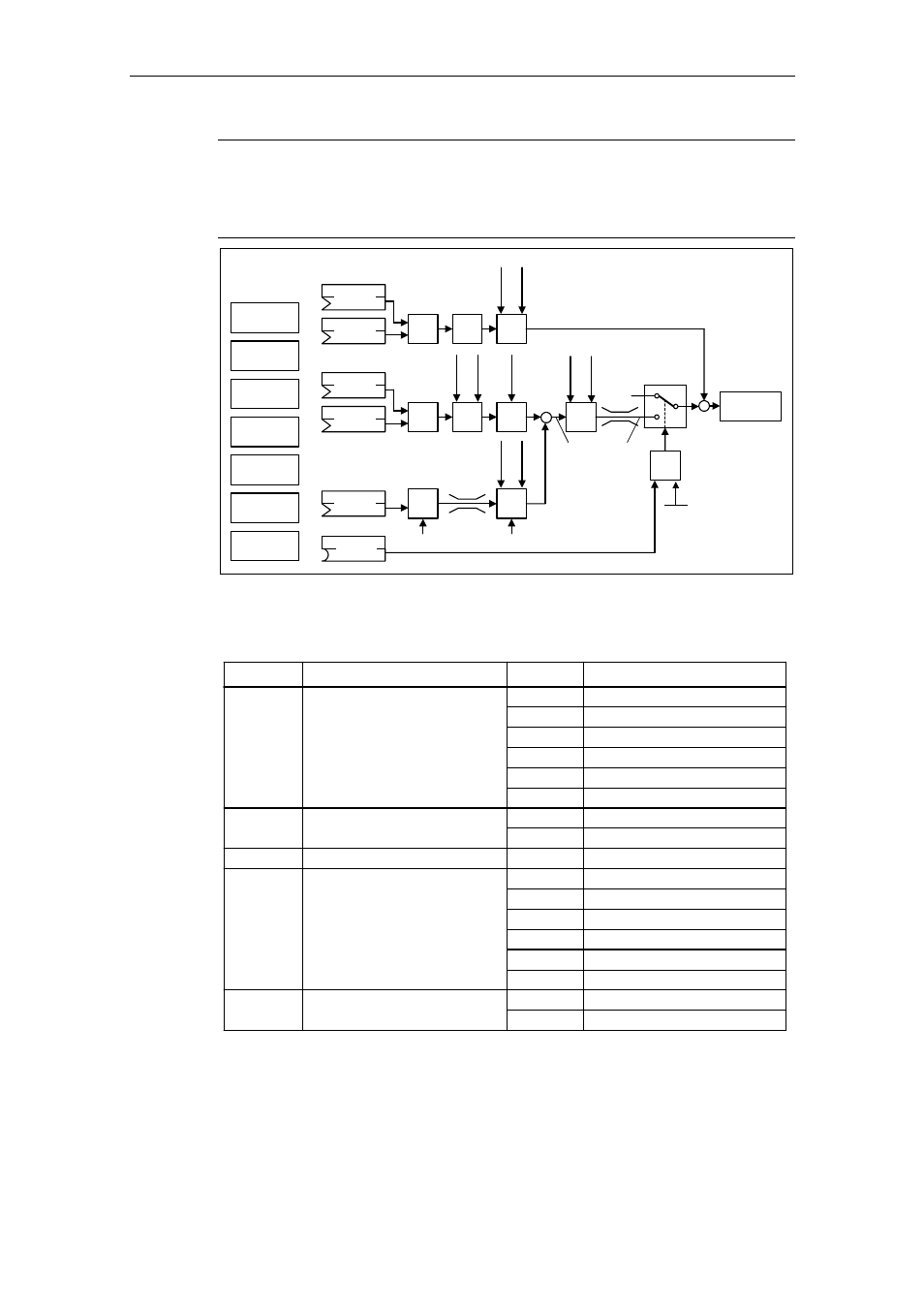
Fig. 3-58
Structure of the closed-loop PID-dancer roll control
Table 3-27
Important parameters for the PID dancer roll control
Parameter
BI: Enable PID controller
P2200
Parameter text
Setting
Meaning
1.0
PID controller always active
Digital input x
722.x
CI: PID setpoint
P2253
1024
Fixed setpoint (FF)
MOP
1050
Analog input 1
755.0
USS on BOP link
2015.1
USS on COM link
2019.1
CB on COM link
2050.1
CI: PID feedback
P2264
755.0
Analog input 1
Analog input 2
755.1
CI: Main setpoint
P1070
PID mode
1024
Fixed setpoint (FF)
MOP
1050
Analog input 1
755.0
USS on BOP link
2015.1
USS on COM link
2019.1
CB on COM link
2050.1
P2251
1
PID as trim