Watson-Marlow MM440 User Manual
Page 125
Issue 10/06
3 Functions
MICROMASTER 440 Operating Instructions
6SE6400-5AW00-0BP0
125
P2292 =...
PID output lower limit
Sets lower limit for the PID controller output in [%].
PID
MOP
ADC
PID
SUM
PID
PID
FF
USS
BOP link
USS
COM link
CB
COM link
ADC2
P2254
P2253
PID
RFG
PID
PT1
−∆
PID
P2200
P2264
PID
PT1
PID
SCL
&
P2251
Output
PID
0
1
Motor
control
P
2257
P
2258
P
2261
P2271
P
226
9
P
227
0
P2265
P
2280
P
2285
0
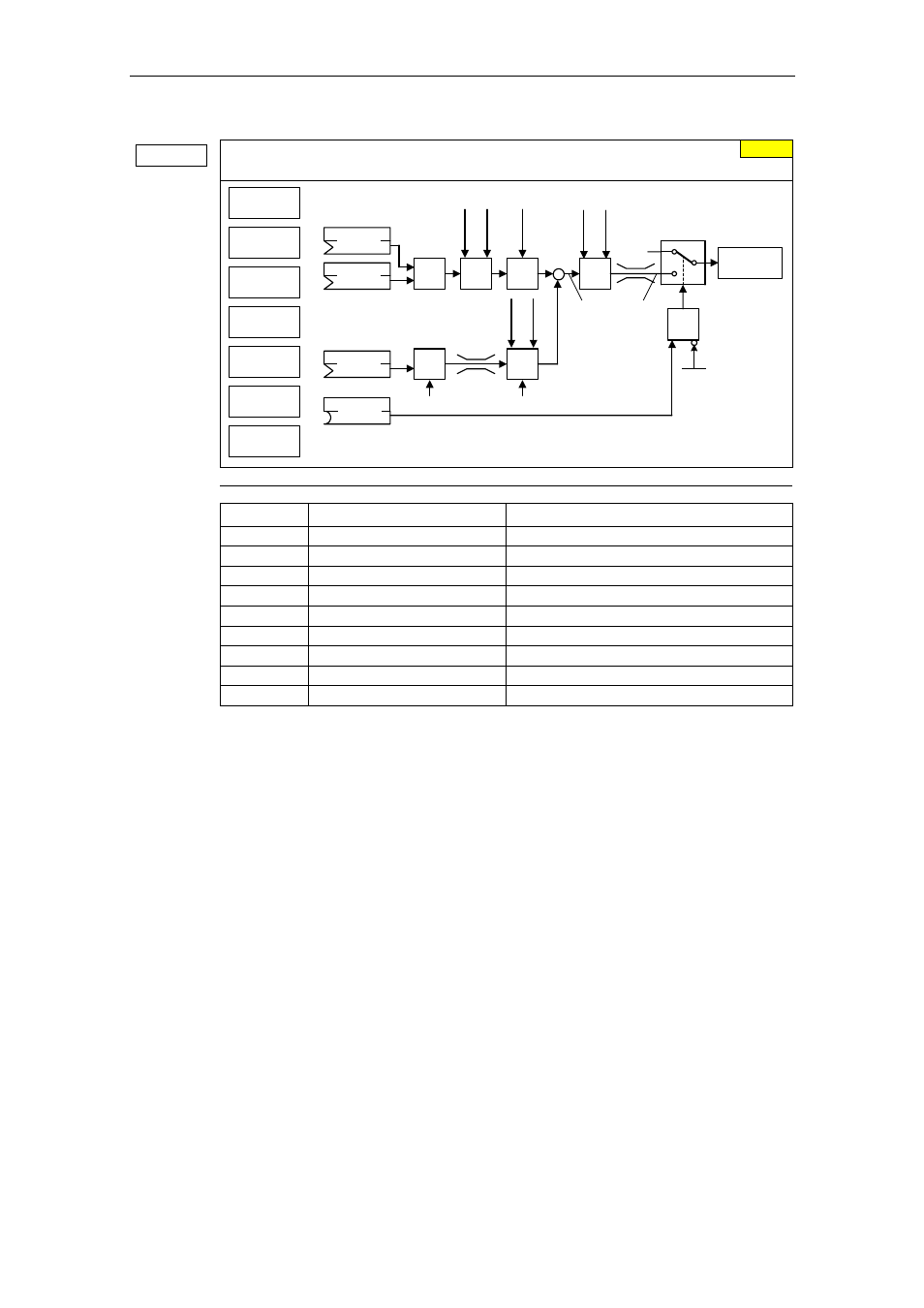
Example:
Parameter Parameter
text
Example
P2200
BI: Enable PID controller
P2200 = 1.0
PID controller active
P2253
CI: PID setpoint
P2253 = 2224 PID-FF1
P2264
CI: PID feedback
P2264 = 755 ADC
P2267
Max. PID feedback
P2267
Adapt to the application
P2268
Min. PID feedback
P2268
Adapt to the application
P2280
PID proportional gain
P2280
Determined by optimizing
P2285
PID integral time
P2285 Determined
by optimizing
P2291
PID output upper limit
P2291
Adapt to the application
P2292
PID output lower limit
P2292
Adapt to the application
0.00 %