10 jog – Watson-Marlow MM440 User Manual
Page 172
3 Functions
Issue 10/06
MICROMASTER 440 Operating Instructions
172
6SE6400-5AW00-0BP0
3.10 JOG
Parameter range:
P1055 – P1061
Warnings A0923
Faults -
Function chart number:
FP5000
The JOG function is used as follows:
¾
To check the functionality of the motor and drive inverter after commissioning
has been completed (the first traversing motion, checking the direction of
rotation, etc.)
¾
Positioning a drive / a driven load into a specific position
¾
Traversing a drive, e.g. after a program has been interrupted
The drive is traversed using this function by entering fixed frequencies P1058,
P1059. The JOG mode can be selected either using the operator panel (refer to
Section 3.2), digital inputs or also via the serial interfaces (refer to the example). An
ON/OFF command is not used to move the drive, but when the "JOG keys" are
pressed. These "JOG keys" are selected using the BICO parameters P1055 and
P1056.
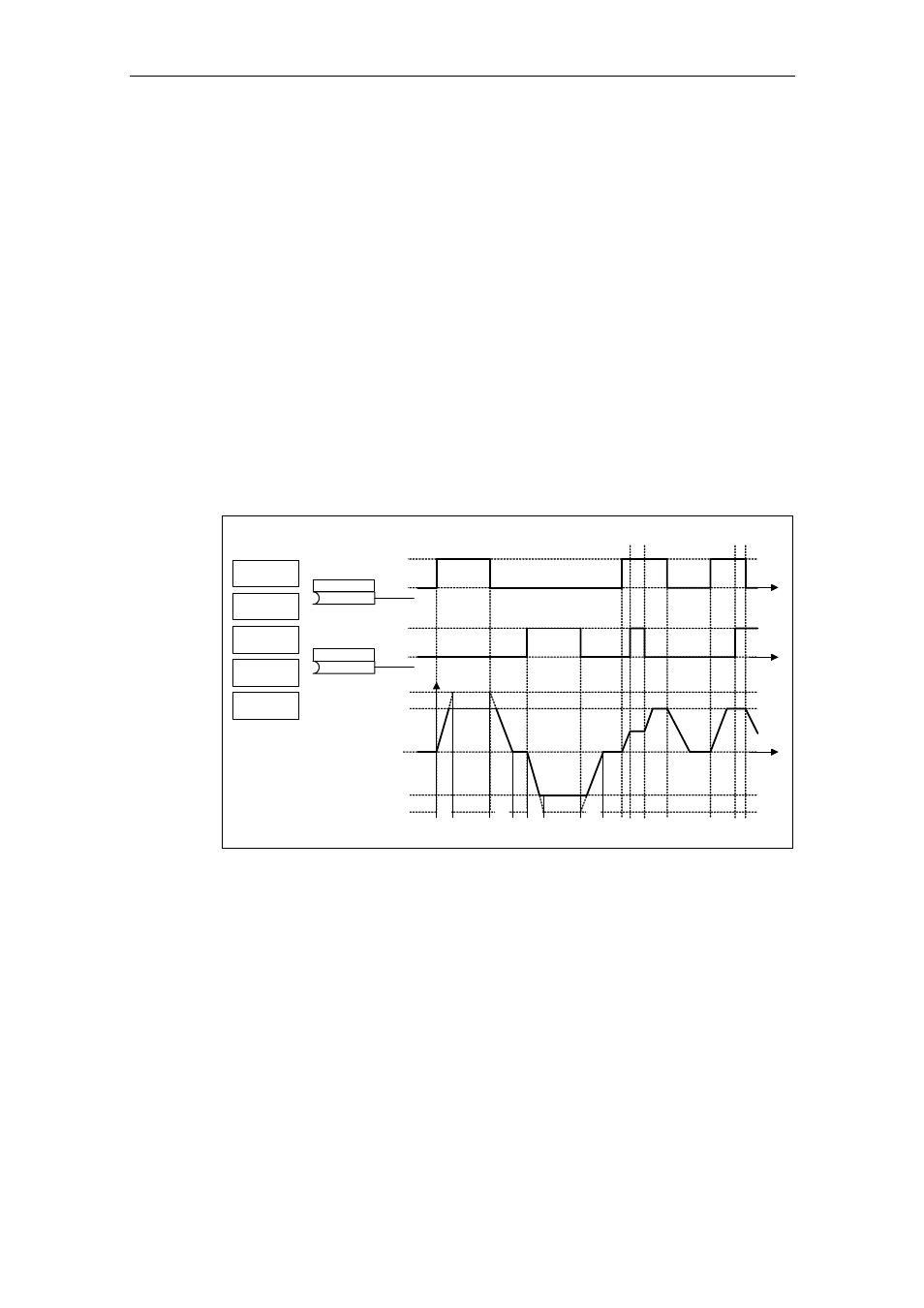
JOG right
f
P1058
P1059
A0923
A0923
P
1
060
P
1
060
(0)
P1055
(0)
P1056
"1"
"0"
"1"
"0"
t
t
t
P
106
1
DIN
BOP
USS
BOP link
USS
COM link
CB
COM link
JOG left
P1082
-P1082
P
1
061
Fig. 3-52
JOG counter-clockwise and JOG clockwise
If both JOG keys are simultaneously pressed, then the instantaneous frequency is
kept (constant velocity phase) and alarm A0923 is output. When a key is pressed,
the drive inverter accelerates the motor to the fixed frequency in the time entered in
P1060. This frequency is only exited after the key has been cancelled and the drive
then brakes down to 0 Hz in the time entered in P1061.
In addition to the explicit parameterization (P1055 and P1056), the JOG
functionality is also enabled via parameter P0700 or P0719 (implicit
parameterization). In this case, if a value is assigned to P0700, the BICO
parameter is appropriately modified.