6 limiting force, 1 internal force limit, Linear – Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors MECHATROLINK-III Communications Reference User Manual
Page 123
4.6 Limiting Force
4-35
4
Op
er
at
io
n
4.6 Limiting Force
The SERVOPACK provides the following four methods for limiting output force to protect the machine.
∗ For details, refer to
Σ
-V Series User's Manual MECHATROLINK-III Standard Servo Profile Commands (No.: SIEP
S800000 63).
Note: The maximum force of the servomotor is used when the set value exceeds the maximum force.
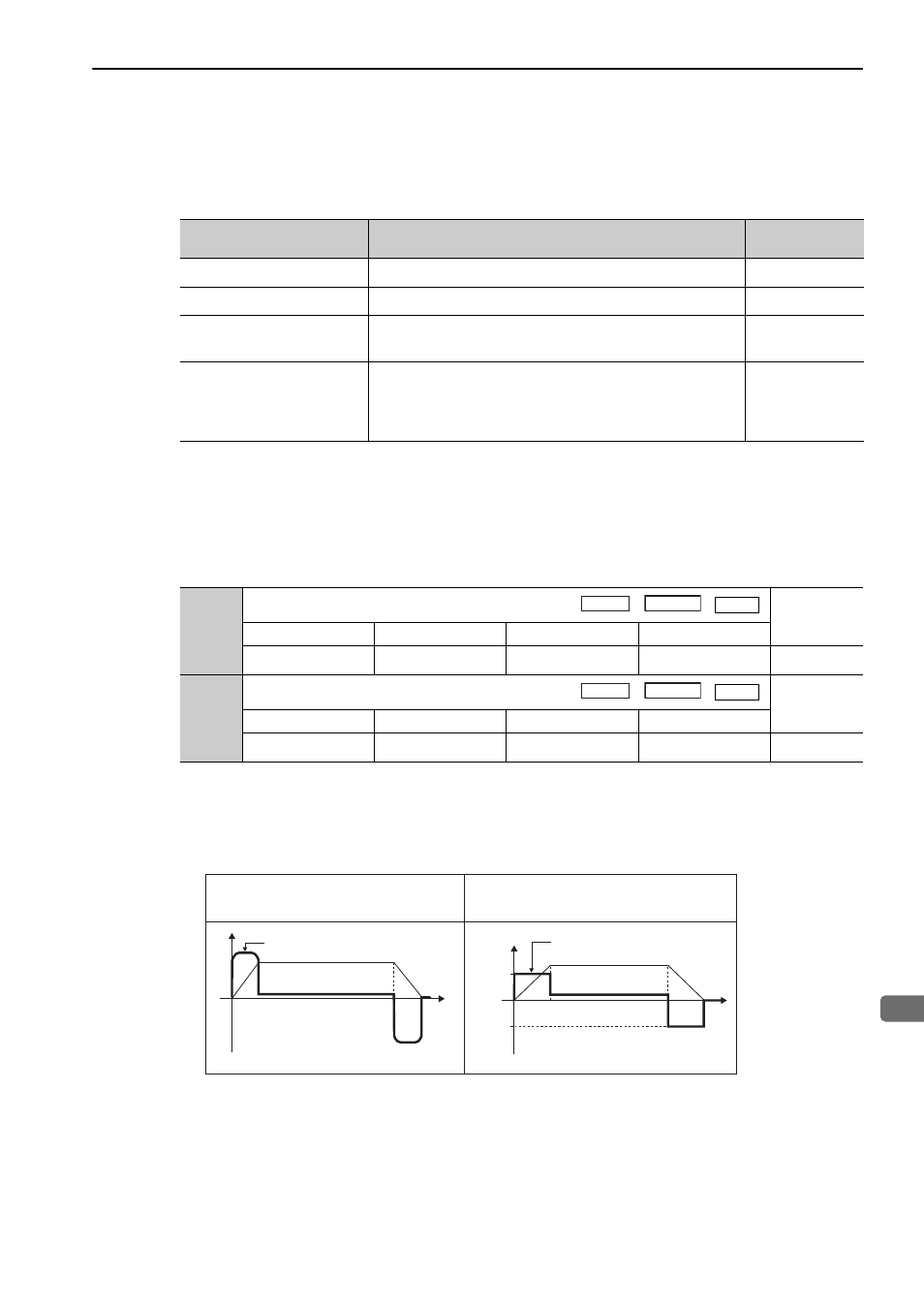
4.6.1 Internal Force Limit
This function always limits maximum output force by setting values of following parameters.
The setting unit is a percentage of the rated force.
Note: If the settings of Pn483 and Pn484 are too low, the force may be insufficient for acceleration or deceleration of the
servomotor.
Force waveform
Limiting Method
Description
Reference
Section
Internal force limit
Always limits force by setting the parameter.
4.6.1
External force limit
Limits force by input signal from the host controller.
4.6.2
Force limit with the command
data (TLIM)*
Limits force by using the command data (TLIM) for force limit-
ing function settable commands.
–
Force limit with P_CL and
N_CL signals of the servo
command output signals
(SVCMD_IO)*
Limits force by using P_CL and N_CL signals of the servo com-
mand output signals (SVCMD_IO).
–
Pn483
Forward Force Limit
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 800
1%
30
Immediately
Setup
Pn484
Reverse Force Limit
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 800
1%
30
Immediately
Setup
Speed
Position
Force
Speed
Position
Force
Speed
Maximum force
t
Speed
Pn484
Pn483
Limiting force
t
No Internal Force Limit
(Maximum force can be output)
Internal Force Limit
Linear