Linear – Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors MECHATROLINK-III Communications Reference User Manual
Page 128
4 Operation
4.7.2 Absolute Data Reception Sequence
4-40
Serial data:
Outputs the current position as serial data after dividing using the value set at Pn281.
Unit: 1048576 pulse/serial data "1"
Initial incremental pulses:
Outputs the current position as pulse data after dividing using the value set at Pn281.
Pulse range: 0 to 1048576 pulse
Output pulse rate: Approx. 0.37
μs
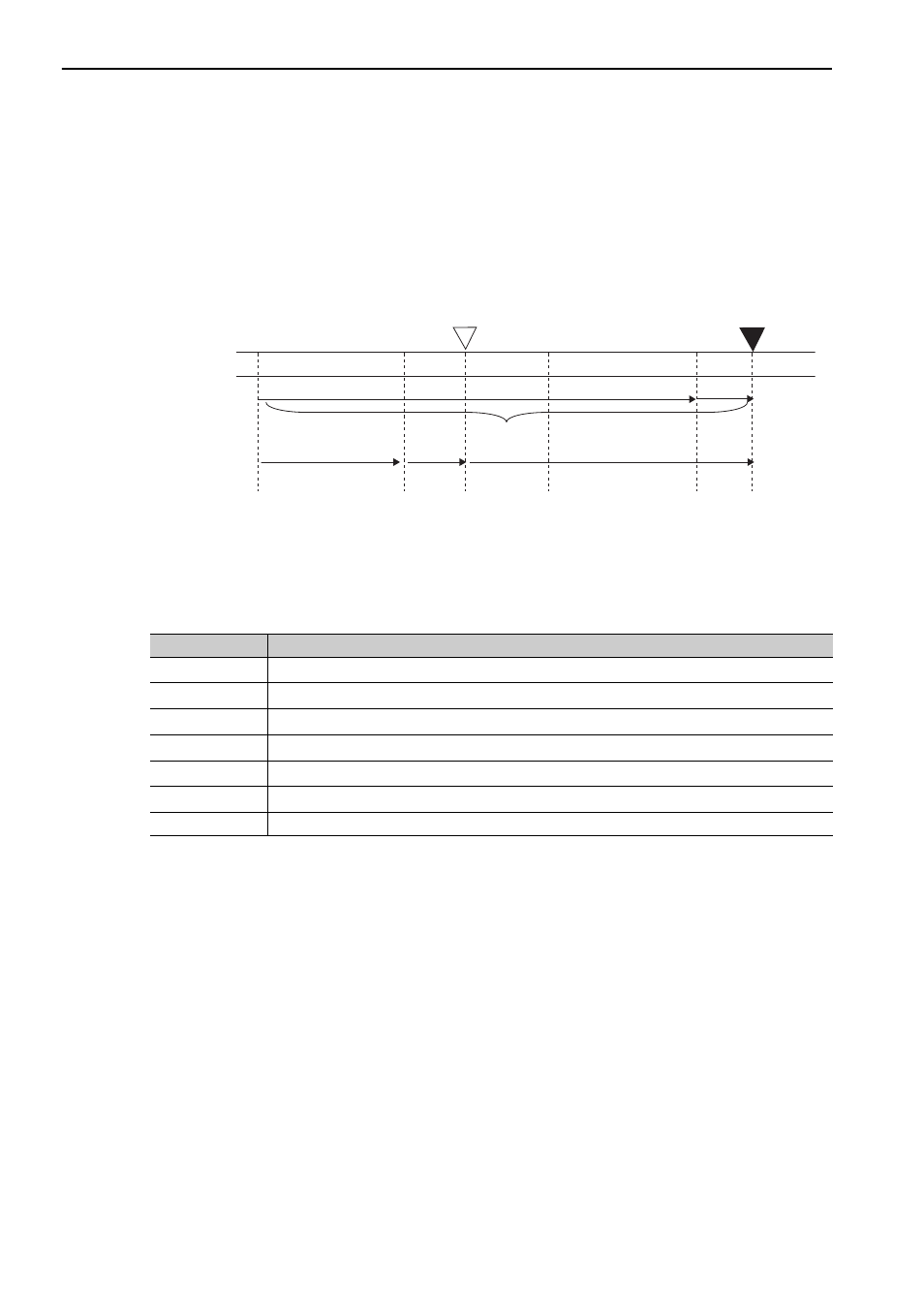
Final absolute data P
M
is calculated by following formula.
P
E
=M
O
× R+P
O
P
M
=P
E
−M
S
× R−P
S
Note: In the case of reverse direction mode (Pn000.0 = 1), use the above-mentioned formula.
Note: When processing the absolute linear scale reception sequence, do not perform counter reset using PCO output.
Current Position
Reference Position
Coordinate
Value
M
O
M
S
Value
M
S
× R
M
O
× R
0
0
1
2
1
2
3
(M
s
)
3
(M
O
)
P
o
P
S
P
E
P
M
Linear
Signal
Meaning
P
E
Current value of linear scale
M
O
Serial data value at current position
P
O
Initial incremental pulses at current position
M
S
Serial data value at reference position
P
S
Initial incremental pulses at reference position
P
M
Current value required for the user’s system.
R
1048576