2) connector type b 1 – Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors MECHATROLINK-III Communications Reference User Manual
Page 149
4.9 Safety Function
4-61
4
Op
er
at
io
n
3.
Connect the safety function device to the safety connector (CN8).
Note: If you do not connect a safety function device, leave the safety function’s jumper connector connected to the safety
connector (CN8). If the SERVOPACK is used without the safety function’s jumper connector connected to CN8, no
current will be supplied to the servomotor and no motor force will be output. In this case, the SERVOPACK will
enter a hard wire base block state.
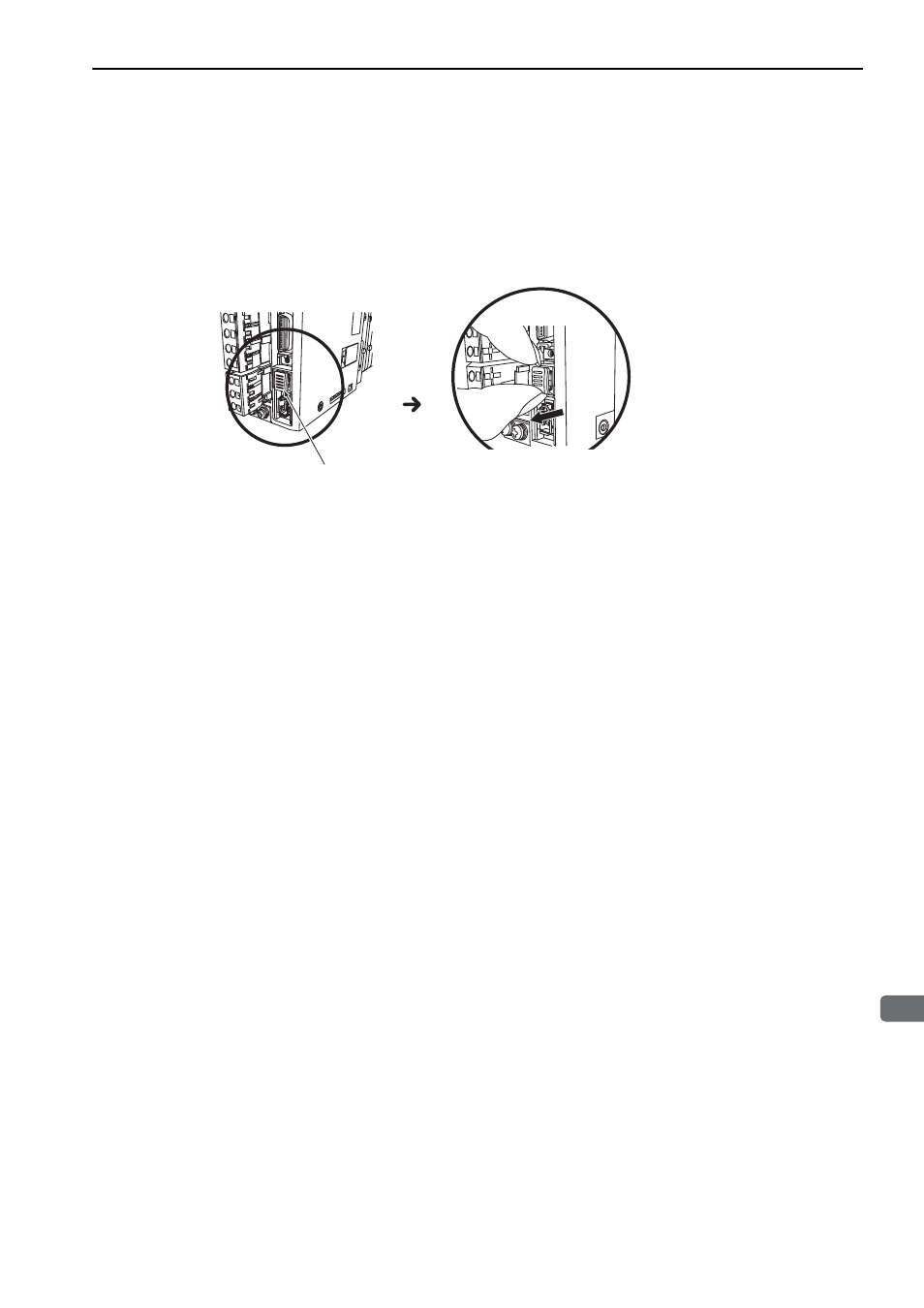
(2) Connector Type B
1.
Remove the safety function’s jumper connector from the safety connector (CN8).
2.
Connect the safety function device to the safety connector (CN8).
Note: If you do not connect a safety function device, leave the safety function’s jumper connector connected to the safety
connector (CN8). If the SERVOPACK is used without the safety function’s jumper connector connected to CN8, no
current will be supplied to the servomotor and no motor force will be output. In this case, the SERVOPACK will
enter a hard wire base block state.
C
N
1
C
N
8
C
N
2
C
N
8
C
N
2
Enlarged View
Safety function’s
jumper connector
Hold the jumper connector with
two fingers and pull it out.