48 and 65 – Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors MECHATROLINK-III Communications Reference User Manual
Page 220
6.3 JOG Operation (Fn002)
6-5
6
Utili
ty Fu
ncti
ons (Fn
)
7
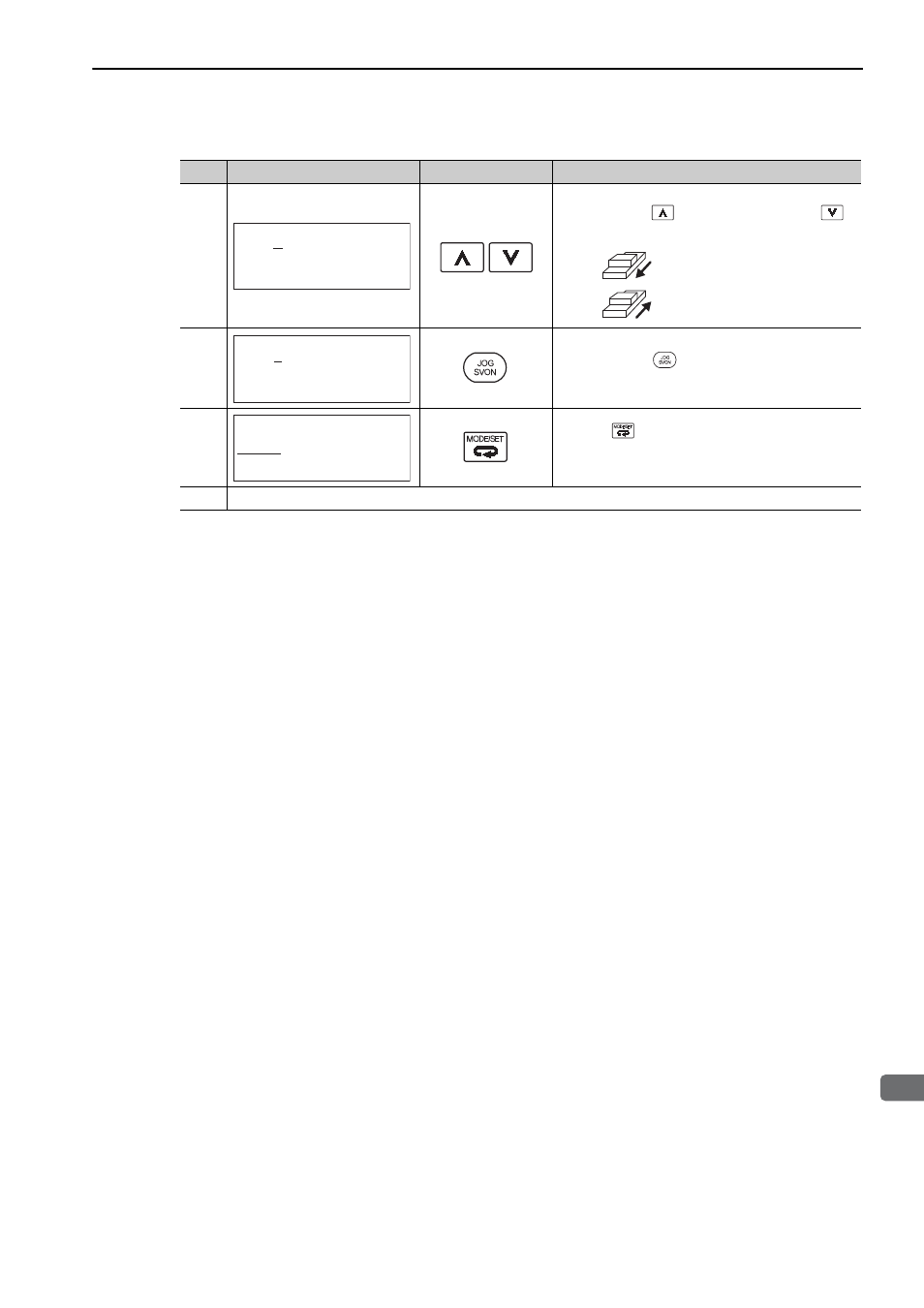
The servomotor will move at the present speed set in
Pn383 while the
Key (for forward run) or
Key (for reverse run) is pressed.
8
After having confirmed the correct motion of servo-
motor, press the
Key.
The status display changes from "RUN" to "BB", and
the servomotor power turns OFF.
9
Press the
Key.
The display returns to the main menu of the utility
function.
10
To enable the change in the setting, turn the power OFF and ON again.
(cont’d)
Step
Display after Operation
Keys
Operation
R U N
− J O G −
P n 3 8 3 = 0 1 0 0 0
U n 0 0 0 =
0
0 0 0 0 0
U n 0 0 2 =
0
0 0 0 0 0
U n 0 0 D =
0
0 0 0 0 0 0 0 0 0 0
48 and 65
Motor forward run
Motor reverse run
48 and
65
B B
− J O G −
P n 3 8 3 = 0 1 0 0 0
U n 0 0 0 =
0
0 0 0 0 0
U n 0 0 2 =
0
0 0 0 0 0
U n 0 0 D =
0
0 0 0 0 0 0 0 0 0 0
48 and 65
B B
− F U N C T I O N −
F n 0 0 0 : A l m H i s t o r y
F n 0 0 2 : J O G
F n 0 0 3 : Z
− S e a r c h
F n 0 0 4 : P r o g r a m J O G