Yaskawa MotionWorks+ Windows Software User Manual
Page 121
MotionWorks+™
Programming Tools
115
mCamCycle - The size of the cam cycle in user units of the cam table (master). This
value is derived by looking at the last master position in the table.
mCamOffset - The relative CAM SHIFT last issued. This value is the value entered in
the CAM SHIFT block’s Shift property.
mCamShift - This is the absolute CAM SHIFT in user units of the external encoder.
This value is added to the external encoder before mPosition_External is modularized
for the cam function. Modularization of mCamOffset is not required; i.e., a cam profile
can be shifted by an amount greater than the machine cycle.
mDeceleration_Linear_Rate - The current deceleration rate of the servo in user units/
s
2
. The same description as mAcceleration_Linear_Rate applies.
mError_Analog_Input - A status bit that indicates if there is a problem with the analog
input circuitry. This could indicate either local or Mechatrolink I/O. Check the
mError_Network* system variables if a mechatrolink network is implemented.
mError_Analog_Output - A status bit that indicates if there is a problem with the ana-
log output circuitry. This could indicate either local or Mechatrolink I/O. Check the
mError_Network* system variables if a mechatrolink network is implemented.
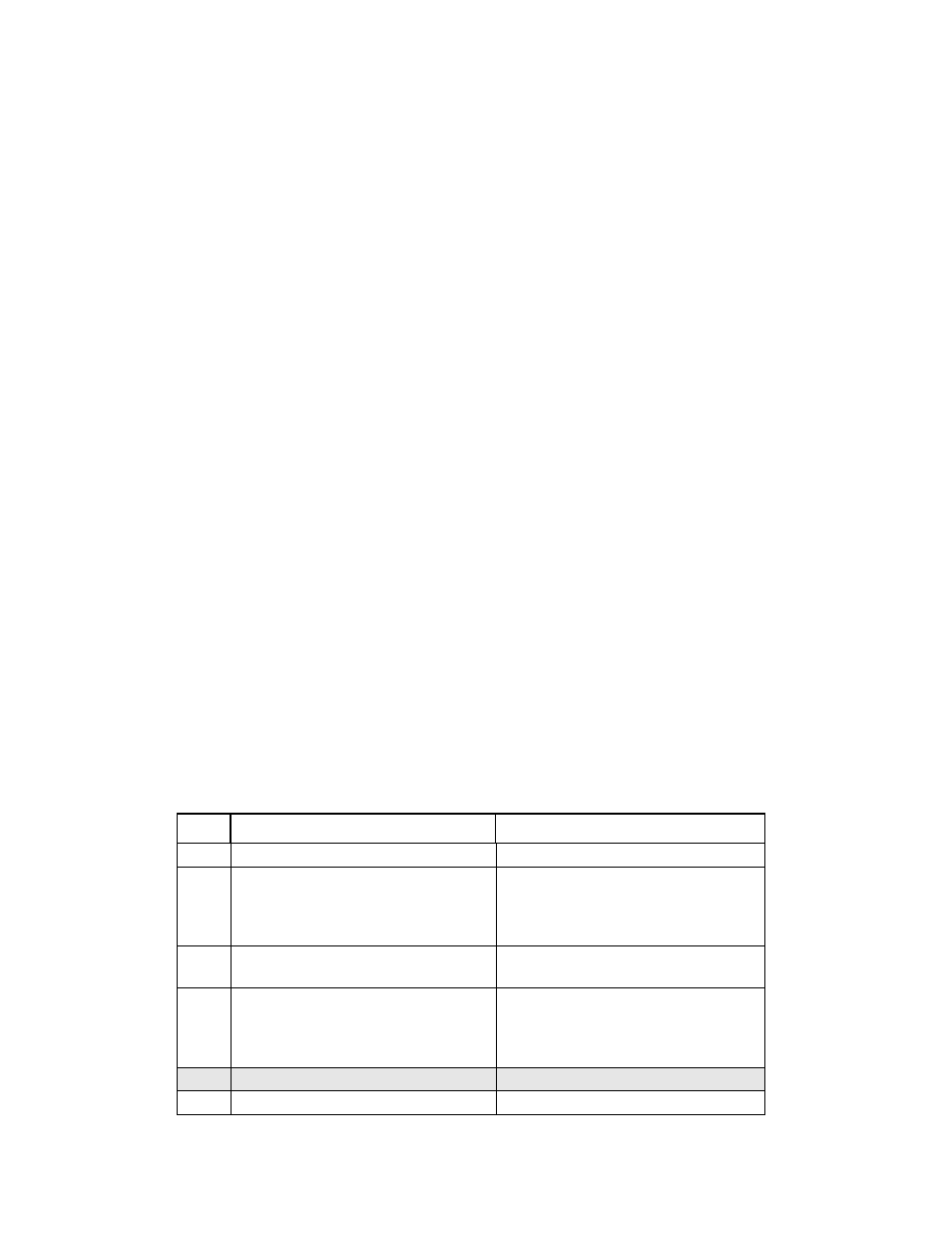
mError_CPU - A word containing status bits indicating various errors. If the SGDH
displays A9F, check this system variable for specific details.
Bit
Description
Check
F
CERF Error
—
E
Network
mError_Network_A
mError_Network_B
mError_Network_C
mError_Network_D
D
External Encoder
mExternal_APhase
mExternal_BPhase
C
SVA - Motion controller section
mPosition_Error_Exceeded
mError_Parameter_Fixed
mError_Parameter_Number
mError_Parameter_Settable
B
Local I/O transmission error
—