Yaskawa MotionWorks+ Windows Software User Manual
Page 29
MotionWorks+™
The Project Explorer
23
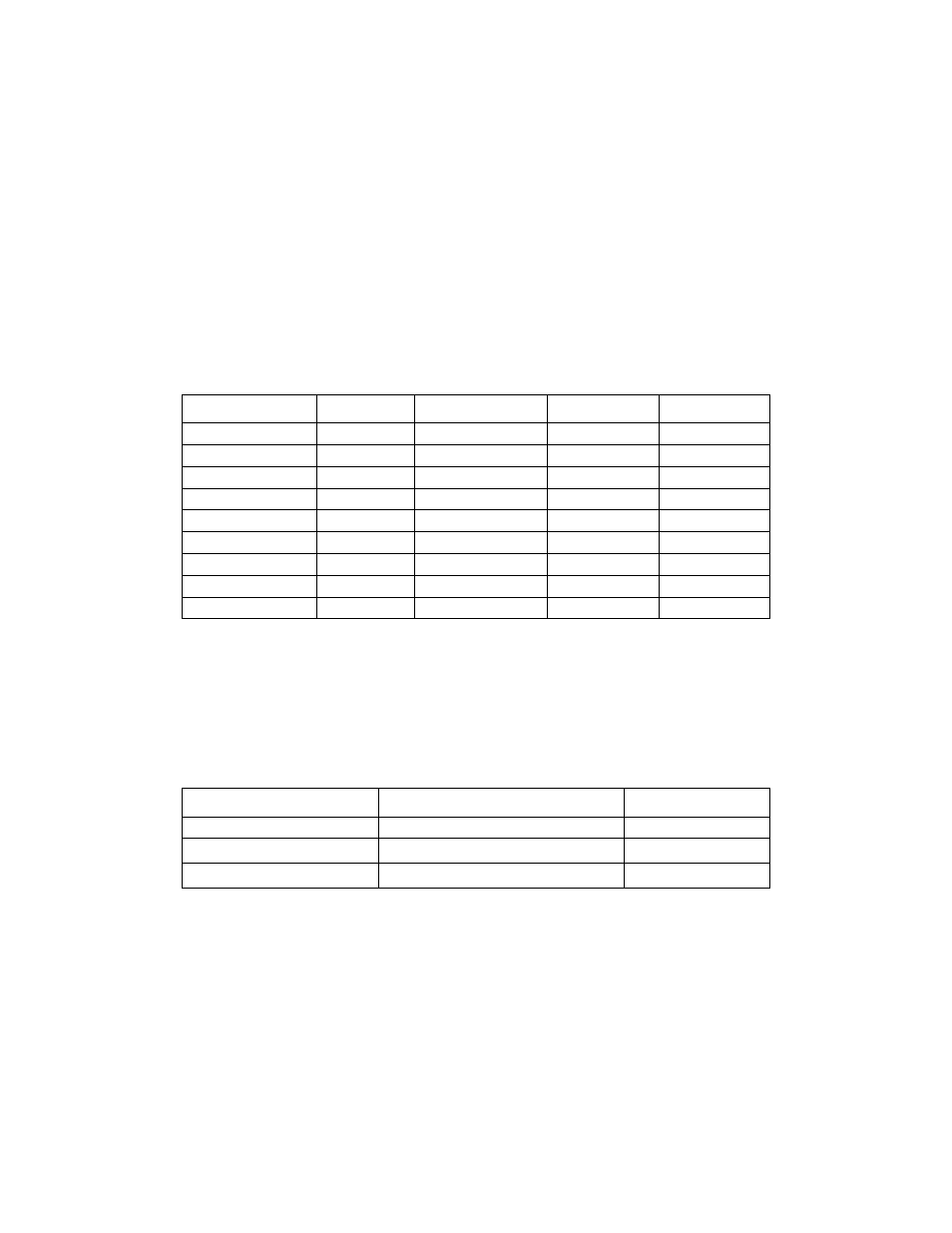
External Encoder
When external encoder is selected, the following properties appear in the properties
window.
These properties are effective for both real and virtual encoders. A virtual encoder is
useful for simulating a machine or creating a time based cam profile. The system
properties for External encoder apply for either mode, making the user units the same.
The virtual encoder is activated by setting the system variable sExternalMode to “1”.
Note: When right clicking on this module, the properties will be sent to the controller,
but only to RAM. Compile & Download is required to retain values after power cycle.
Enabled:
If Enabled is “True”, the MP940 expects an encoder to be con-
nected (i.e., an alarm is set if no encoder is connected). If a vir-
tual encoder is used, set enabled=false, or an A9F alarm will
result.
Feed Constant:
The number in user units that the load travels for each revolu-
tion of the final output shaft of the mechanical system.
Gear Box Input: If a mechanical gear box is used, enter the value which corre-
sponds to the number of times the input shaft rotates for the
number of times the output shaft rotates. These are integer val-
ues. If a 10:1 gear box is used, enter “10” for the gear box
input.
Property
Default
Minimum
Maximum
Detail
Enabled
False
False
True
Setting
Feed Constant
1
0.001
8338608 Constant
Gear Box Input
1
1
32767 Numerator
Gear Box Output
1
1
32767 Denominator
Machine Cycle
1
.001
2147483647 Modulus
Movement Type
Rotary
Linear
Rotary
Setting
Pulse Type
Quadrature Pulse & Direction
Quadrature
Setting
Resolution
2048
8
2147483647 Counts
User Units
Degrees
N/A
N/A
—
Final Output Shaft
Detail
Feed Constant
Ball screw
6mm pitch
6
Conveyor belt
roller = 4in diameter
4 x
π
Belt and pulley
last pulley = 10in diameter
10 x
π