Running – Yaskawa MotionWorks+ Windows Software User Manual
Page 217
MotionWorks+™
Appendix C MW+ Camming 101
211
Running
During run, the following happens at each high speed scan: The controller reads the exter-
nal encoder, modularizes it, scales it to the cam table, sends it to a function that finds the
required slave position, and adds this result to the slaves cumulative offset position, and
then adds the SLAVE OFFSET. This forces the slave to move as the master moves.
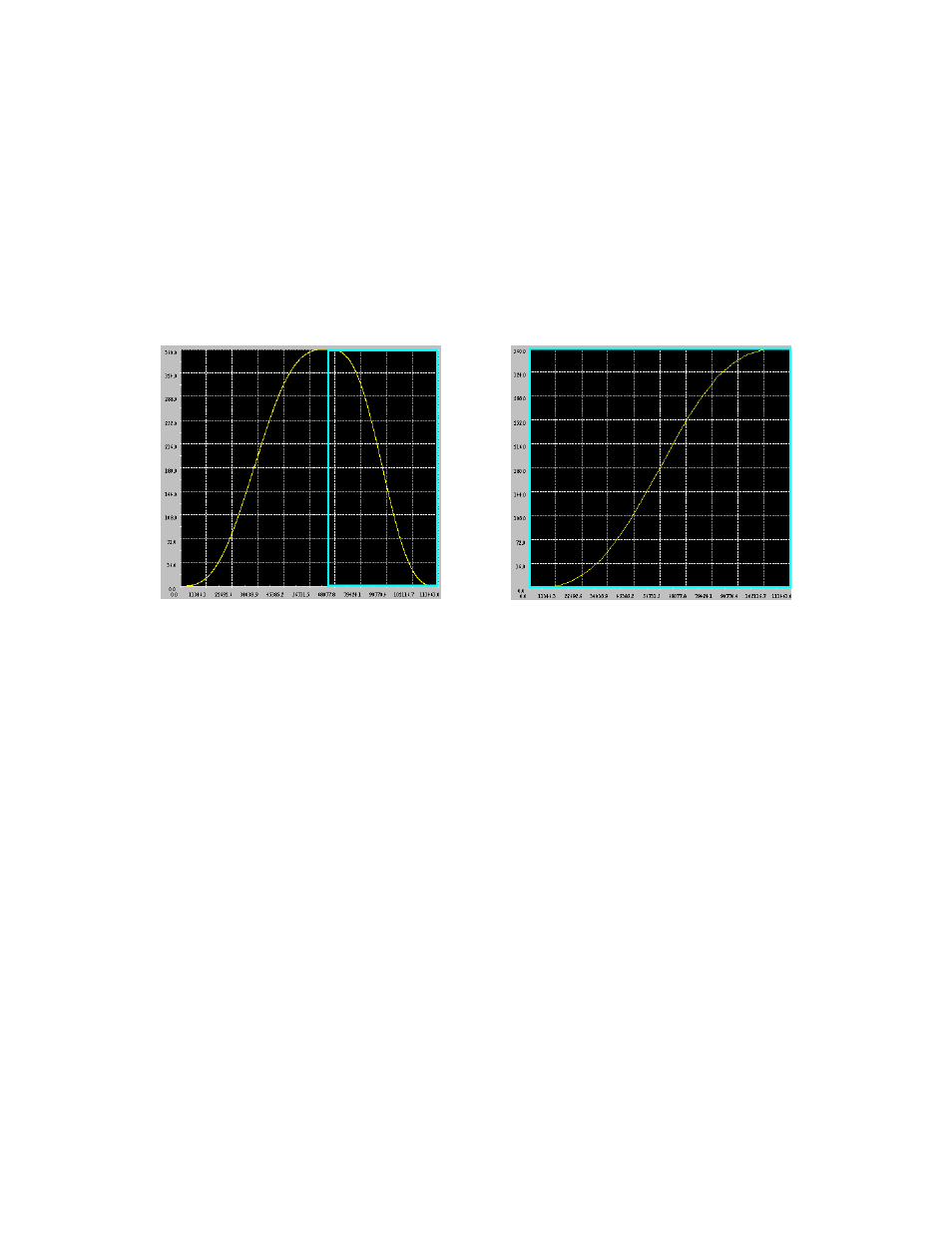
There are basically two types of cam tables; “one way cam,” and “out and back.” The
controller detects the type of cam by comparing the first slave position to the last slave
position.
Out and back is simple; the values in the cam table can be considered the absolute posi-
tions of the slave, it will never be outside the range of values in the table.
A one-way cam uses the absolute slave positions in the table once. After that, the slave is
outside the range of the values found in the table. To account for this, the controller
detects when the master position exceeded the machine cycle, and adds an offset to the
slave according to the following formula:
Offset=Offset + ((SlaveLast – SlaveFirst) * ScaleCam)
When the next scan starts, the modularized master position will be pointing to the begin-
ning of the table. A small slave position will result. This small position is added to the
offset from the last cycle, and the slave continues to move forward.