Disable handler, Fault recovery – Yaskawa MotionWorks+ Windows Software User Manual
Page 189
MotionWorks+™
Standardized Template Project
183
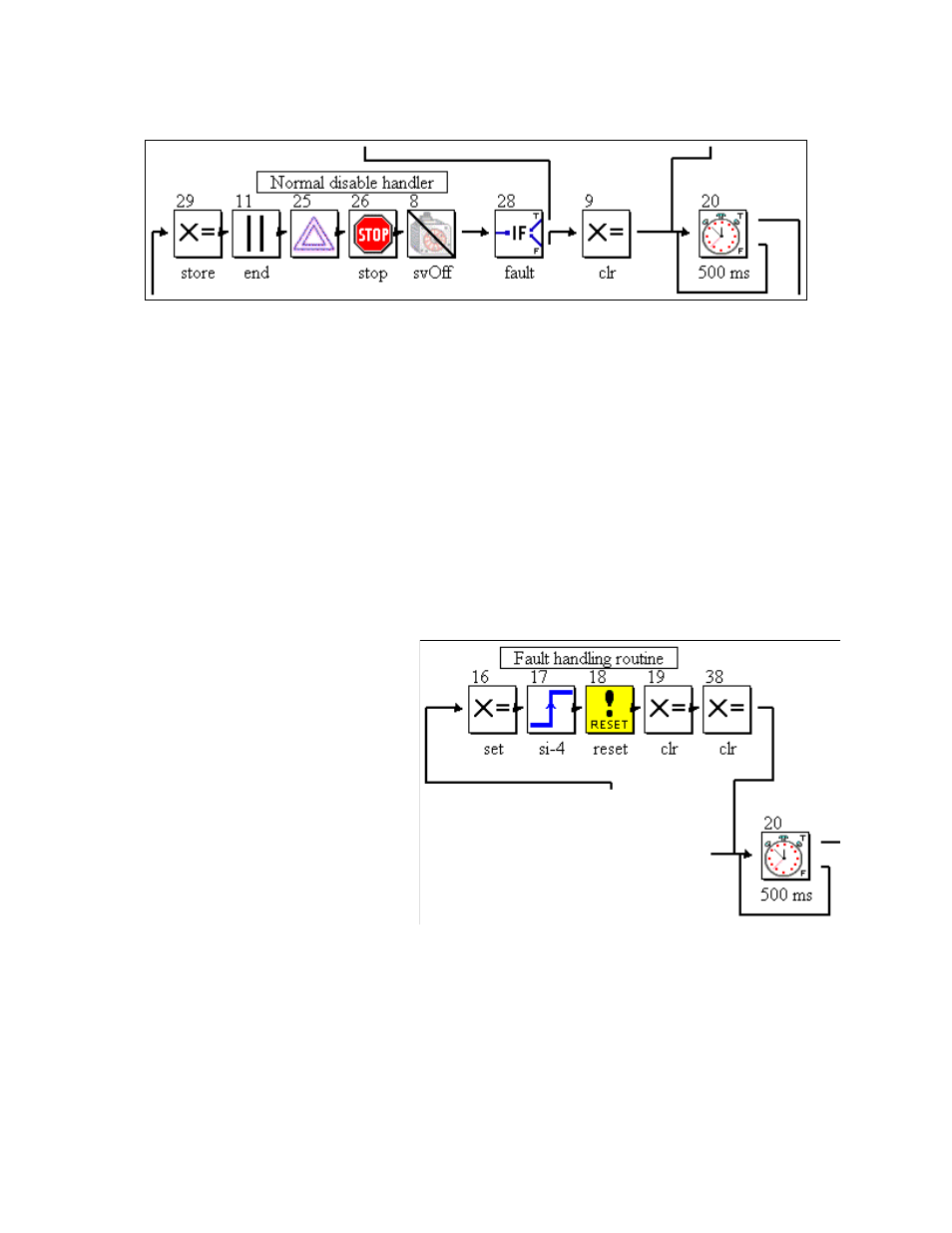
Disable Handler
When a fault or normal disable is detected, this section of code is executed. The first
block (29) stores the commanded and actual position (these may be useful in a recovery
routine). Next, the other main programs are halted; the servo is commanded to go to zero
speed (25), then stop (26), and lastly the SERVO Off block (8) is executed.
If a fault has occurred, block (28) will direct execution to the fault recovery section, other-
wise block (9) is executed. Block (9) clears all of the outputs that may have been inadvert-
ently left on. The Disable handler and the fault recovery routine both make use of Block
(20). It is simply a timer that ensures time for recovery before attempting a restart. After
block (20) execution continues back to block (3).
Fault Recovery
Once it has been determined
that a fault occurred and the
appropriate blocks have exe-
cuted, the program ends up in
the fault recovery section.
Block (16) sets an output to
indicate that a fault has occurred
(in the case of the demo box, it
actually sets all eight outputs).
INPUT block (17) waits to see
the rising edge transition of
SGDH input SI-4 (coincidently,
the Servo Alarm Reset input
when the servo amplifier is used
alone). RESET FAULT block (18) will reset any servo amplifier alarm that does not
require a power cycle to reset. Lastly, SET VARIABLE blocks 19 and 38 clear the alarm
output and all of the internal error bits. Block (20) was discussed above in the Disable
Handler section.