Torque - subroutine, Latch - subroutine – Yaskawa MotionWorks+ Windows Software User Manual
Page 202
Standardized Template Project
MotionWorks+™
196
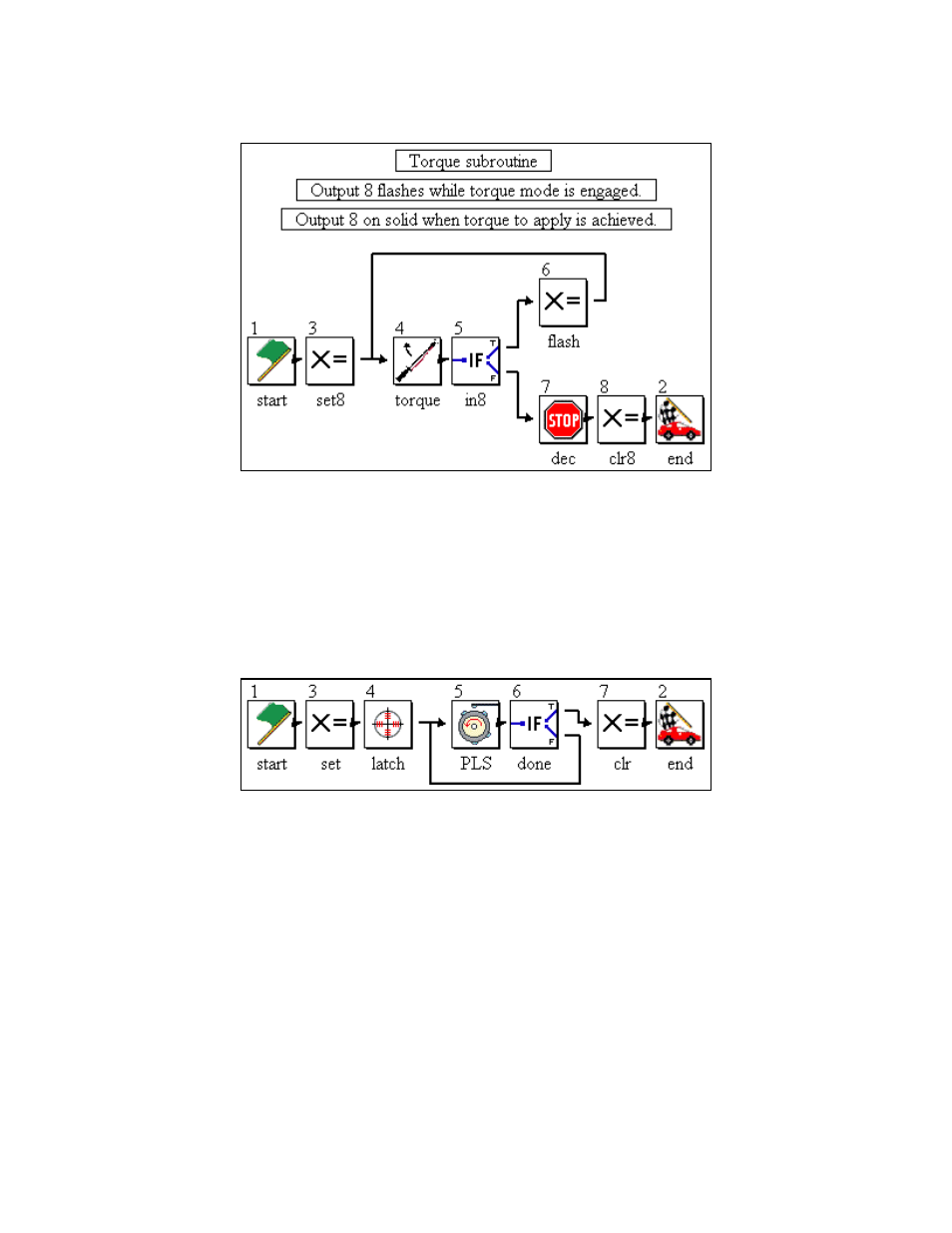
Torque - Subroutine
The motor applies a variable amount of torque (based on a user variable [TorqueToAp-
ply]). It also limits the velocity of the motor (based on a user variable [Vel]). This contin-
ues for as long as input 8 is activated. Output 8 flashes while applying torque and goes on
solid when motor is operating below the velocity limit. Once input 8 is deactivated the
servo decelerates to stop, output 8 is deactivated and the subroutine is exited.
Latch - Subroutine
The latch subroutine works very similarly to the move subroutine. The main difference
(besides the lack of timers in this subroutine) is the move block has been replaced with a
Latch Target block (4). Additionally, the values in PLS block (5) have been modified to
be more suitable for the Latch routine. The routine has been configured to activate output
during the various states of latching.