Super Systems PC Configurator 2 User Manual
Page 134
Super Systems Inc.
Page 134 of 201
Configurator Manual #4562 Rev D
will allow the user to minimize, if not remove, the possibility for an overshoot of the setpoint. If
a small overshoot is acceptable, leave the “Conservative” checkbox unchecked. If, however, no
overshoot is desired, then checking the “Conservative” checkbox will accomplish this. The
current value for the process variable (PV) and the selected loop’s setpoint (SP) will be
displayed under the “Tuning Types” section. Click on the Start button to begin the auto tune
process.
Note: The process may take a few seconds to start
. Once the process has started,
the “Idle” line will change to “Tuning: Pointer xx”. This means that the calibration process is
working. When the calibration is finished, the “Tuning: Pointer xx” line will read “Idle” again,
and the list underneath will be populated with suggested PID settings.
Note: clicking on the
Done button while the tuning is in progress will close down the screen, but the user will have
to confirm the action
.
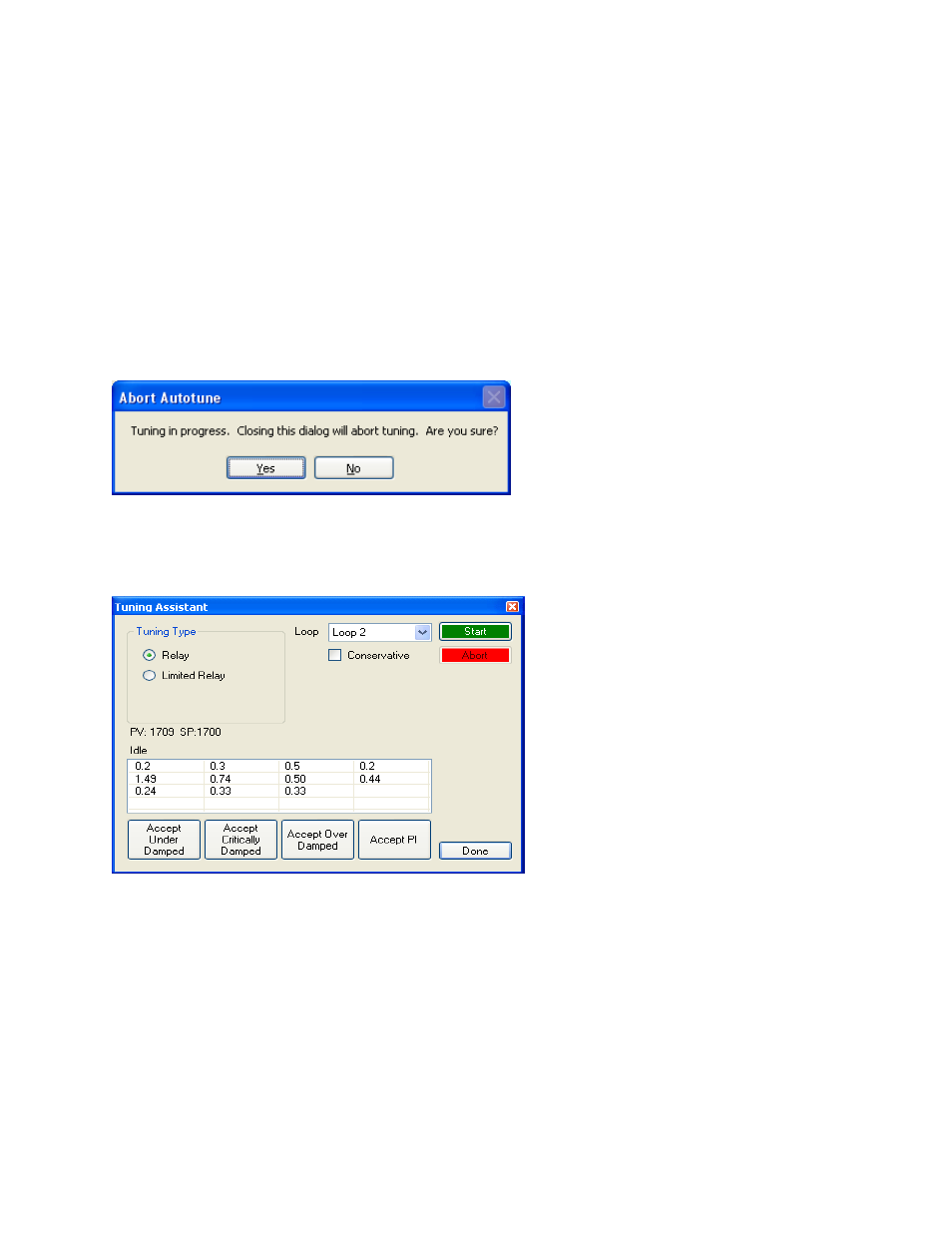
However, clicking on the Abort button will simply
abort the calibration process
.
Configurator – Abort Autotune message box
Clicking on the Yes button will abort the calibration and close down the screen, while clicking
on the No button will cancel the abort process.
Configurator – Tuning Assistant with suggested PID settings
Each column for the PID settings relates to the button below. For example, the second column
is the PID settings for the Critically Damped values. The user can accept only one set of
numbers. To select a set of values, click on the corresponding button. For example, to accept
the critically damped values, click on the Accept Critically Damped button.
The under damped values will reach the setpoint faster, but there will be more overshoot
involved. The over damped values will work to minimize the overshoot, but it will be slower
than the under damped values. The critically damped values are considered the “optimum”
values because they are a balance between the under damped and over damped values with
regards to time and overshoot. The PI values are just the proportional band and the reset