Yaskawa Sigma Mini User Manual
Page 101
2.6Minimizing Positioning Time
— 2-57 —
Use the following parameters to set the mode switch to be used.
Memory
Switch
Cn-01
Mode Switch Type
Parameter for
Setting Detec-
tion Point
Bit D
Bit C
tion Point
0
0
Uses torque reference as a detection point.
Cn-0C
0
1
Uses speed reference as a detection point.
Cn-0D
1
0
Uses acceleration reference as a detection point.
Cn-0E
1
1
For speed/
torque con-
trol
Does not use mode switch.
For position
control
Uses error pulse as a detection point.
Cn-0F
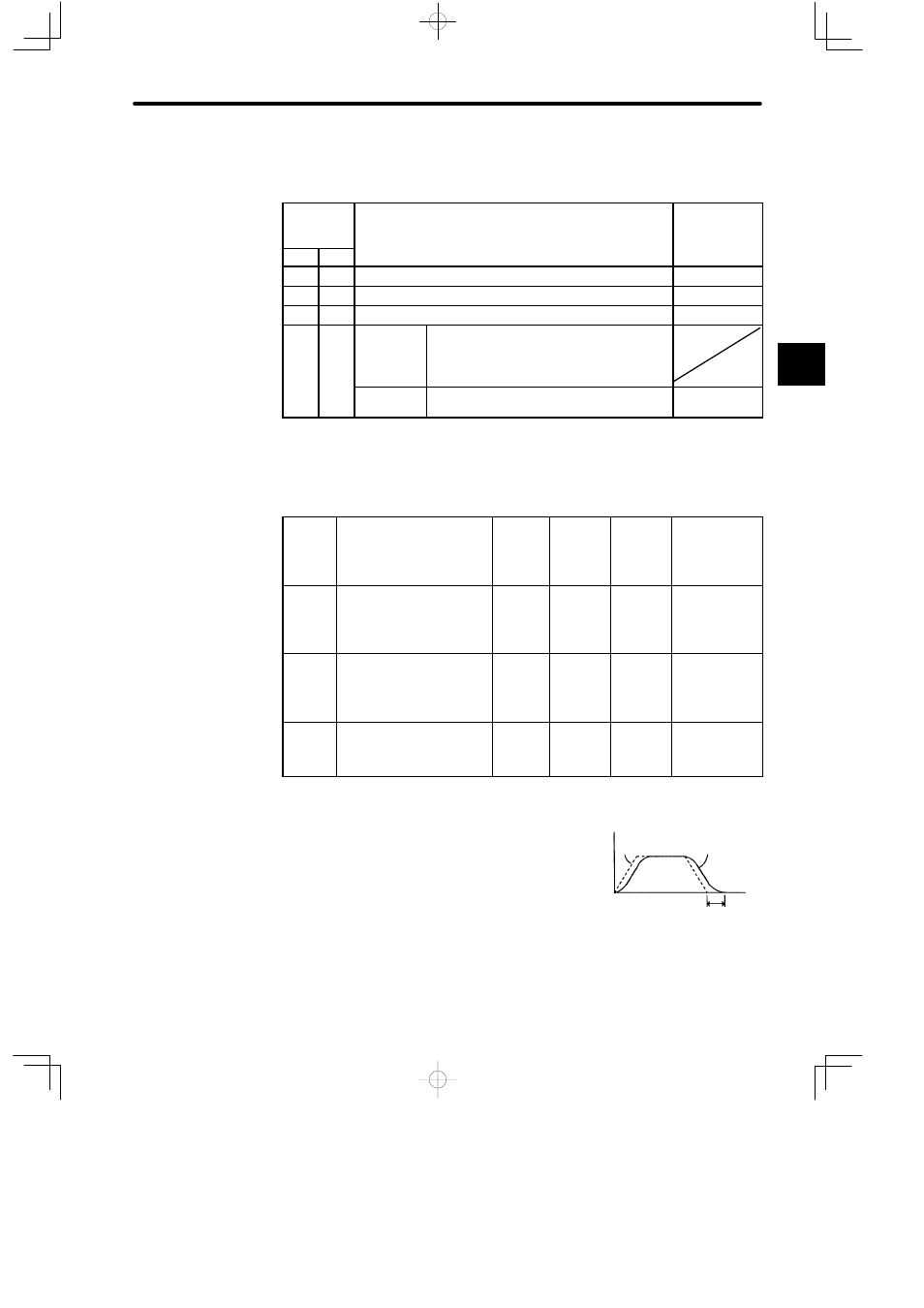
The mode switch is used to reduce settling time and suppress undershoot when the motor
stops. It switches PI control to P control when certain conditions are met.
Cn-0C
TRQMSW Mode Switch
(Torque
Reference)
Unit: %
Setting
Range: 0
to
Maximum
Torque
Factory
Setting:
200
For
Speed/Torque
Control and
Position
Control
Cn-0D
REFMSW
Mode Switch
(Speed
Reference)
Unit:
min
−1
Setting
Range: 0
to
Maximum
Speed
Factory
Setting: 0
For
Speed/Torque
Control and
Position
Control
Cn-0E
ACCMSW Mode Switch
(Acceleration
Reference)
Unit: 10
(min
−1
)/s
Setting
Range: 0
to 3000
Factory
Setting: 0
For
Speed/Torque
Control and
Position
Control
Cn-0F
ERPMSW Mode Switch
(Error Pulse)
Unit:
Refer-
ence
Unit
Setting
Range: 0
to 10000
Factory
Setting:
10000
For Position
Control
The mode switch is used to reduce settling time and
suppress undershoot when the motor stops. It
switches PI control to P control when certain condi-
tions are met.
The Servopack allows use of four different types of mode switch. To select a mode switch, set
bits B, C and D of memory switch Cn-01.
2
Speed
Reference
Actual motor
operation
Time
Settling time