Yaskawa Sigma Mini User Manual
Page 163
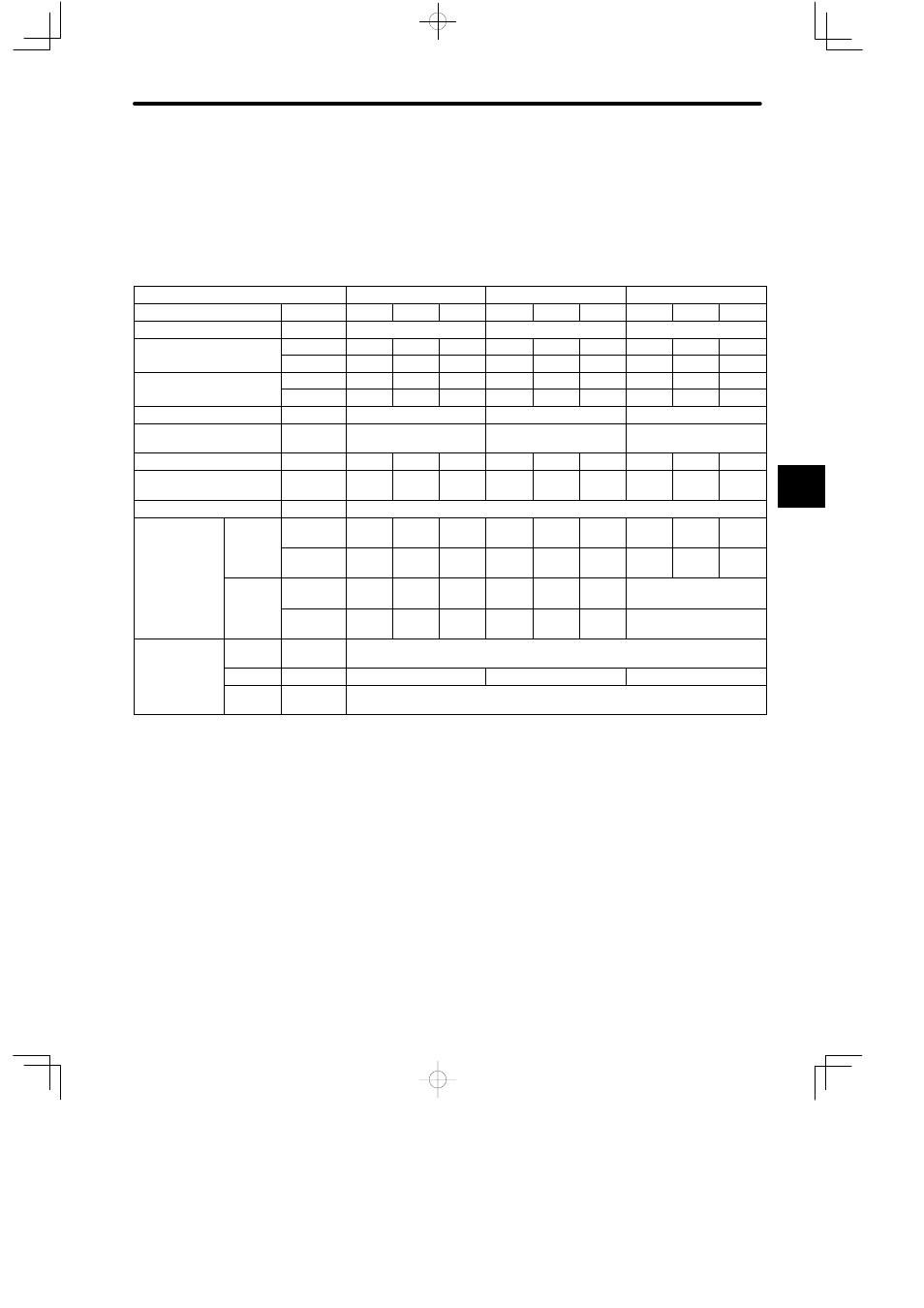
4.2Servomotor Ratings and Characteristics
— 4-13 —
Note These characteristics can be obtained when the following heat sinks (steel plates) are
used for cooling purposes:
Model A1 or A2: 150 x 150 x 3 mm (5.91 x 5.91 x 0.12 in.)
Model A3: 250 x 250 x 6 mm (9.84 x 9.84 x 0.24 in.)
Servomotors with Reduction Gears
SGMM Servomotor
A1C3Jj
A2C3Jj
A3C3Jj
Gear Ratio
*1
---
1/5
1/16
1/25
1/5
1/16
1/25
1/5
1/16
1/25
Rated Output
W (HP)
8 (0.01)
16 (0.02)
24 (0.03)
Rated Torque
*2
N¡m
0.127
0.407
0.636
0.255
0.815
1.27
0.382
1.22
1.91
q
oz¡in
*6
18.1
57.7
90.1
36.10
115
181
54.1
173
271
Instantaneous Peak
T
N¡m
0.430
1.38
2.15
0.860
2.55
*5
2.26
*5
1.29
3.23
*5
4.31
*5
Torque
oz¡in
*6
60.9
195
304
122
361
*5
320
*5
183
458
*5
610
*5
Rated Current
A (rms)
2.1
2.0
2.9
Instantaneous Maximum
Current
A (rms)
6.0
5.7
8.6
Rated Speed
min
−1
600
187.5
120
600
187.5
120
600
188
120
Instantaneous Maximum
Speed
*3
min
−1
1000
312.5
200
1000
312.5
200
1000
313
200
Applicable Encoder
---
2048 P/R incremental encoder
Moment of
Inertia
(
t d t
Without
Brake
¢
10
−4
kg¡m
2
0.00529 0.00454 0.00418 0.00723 0.00648 0.00612 0.00917 0.00842
0.0806
(converted to
motor shaft)
(motor +
(×10
−3
oz¡in¡s
2
)
*6
0.0750 0.0643 0.0592 0.1024 0.0918 0.0867 0.1299 0.1193
1.142
(motor +
reduction gear)
[J
M
= GD
2
M
/4]
With
Brake
¢
10
−4
kg¡m
2
0.00662 0.00587 0.00551 0.00858 0.00783 0.00747
---
[J
M
GD
M
/4]
(×10
−3
oz¡in¡s
2
)
*6
0.0938 0.0832 0.0781 0.1216 0.1110 0.1058
---
Brake
(optional)
*4
Rated
Voltage
V
24 VDC
(opt o a )
Capacity
W
2.0
2.6
2.6
Holding
Torque
---
Motor rated torque
Note
(1) The specifications and torque-motor speed characteristics are quoted in combination
with a Servopack at an armature winding temperature of 100°C.
(2) Lost motion is 0.5° max. for all types.
(3) The output torque of the reduction gears is defined as follows:
Reduction gear output torque = Motor output torque x Deceleration rate x Efficiency
The efficiency of motor rated torque with a rated speed of 3000 min
−1
is 80%.
*
1
A planetary-pinion geared decelerator is used.
*
2
The rated torque is the continuous allowable torque at 40 °C with a heat sink attached.
Heat sink dimensions: 150 x 150 x 3 mm (5.91 x 5.91 x 0.12 in.)
4