Yaskawa Sigma Mini User Manual
Page 89
2.4Setting Stop Mode
— 2-45 —
For brake ON timing during motor operation, use Cn-15 and Cn-16.
Setting the Holding Brake
Set the following parameters to adjust brake ON timing so that holding brake is applied when
the motor stops.
Cn-15
BRKSPD
Speed Level at which
Brake Signal Is Output
during Motor
Operation
Unit:
min
−1
Setting
Range:
0 to
Maximum
Speed
Factory
Setting:
100
For
Speed/Torque
Control and
Position
Control
Cn-16
BRKWAI
Output Timing of Brake
Signal during Motor
Operation
Unit:
10 ms
Setting
Range: 10
to 100
Factory
Setting:
50
For
Speed/Torque
Control and
Position
Control
Cn-15 and Cn-16 are used to set brake timing when
the servo is turned OFF by input signal /S-ON or alarm
occurrence during motor rotation.
Brakes for Servomotors are designed as holding
brakes. Therefore, brake ON timing when the motor
stops must be appropriate. Adjust the parameter set-
tings while observing machine operation.
Conditions for /BK Signal Output During Motor Operation
The circuit between CN1-8 and CN1-3 is opened in either of the following situations.
1
Motor speed drops below the value set in Cn-15 (BRKSPD) after servo OFF occurs.
2
The time set in Cn-16 (BRKWAI) has elapsed since servo OFF occurred.
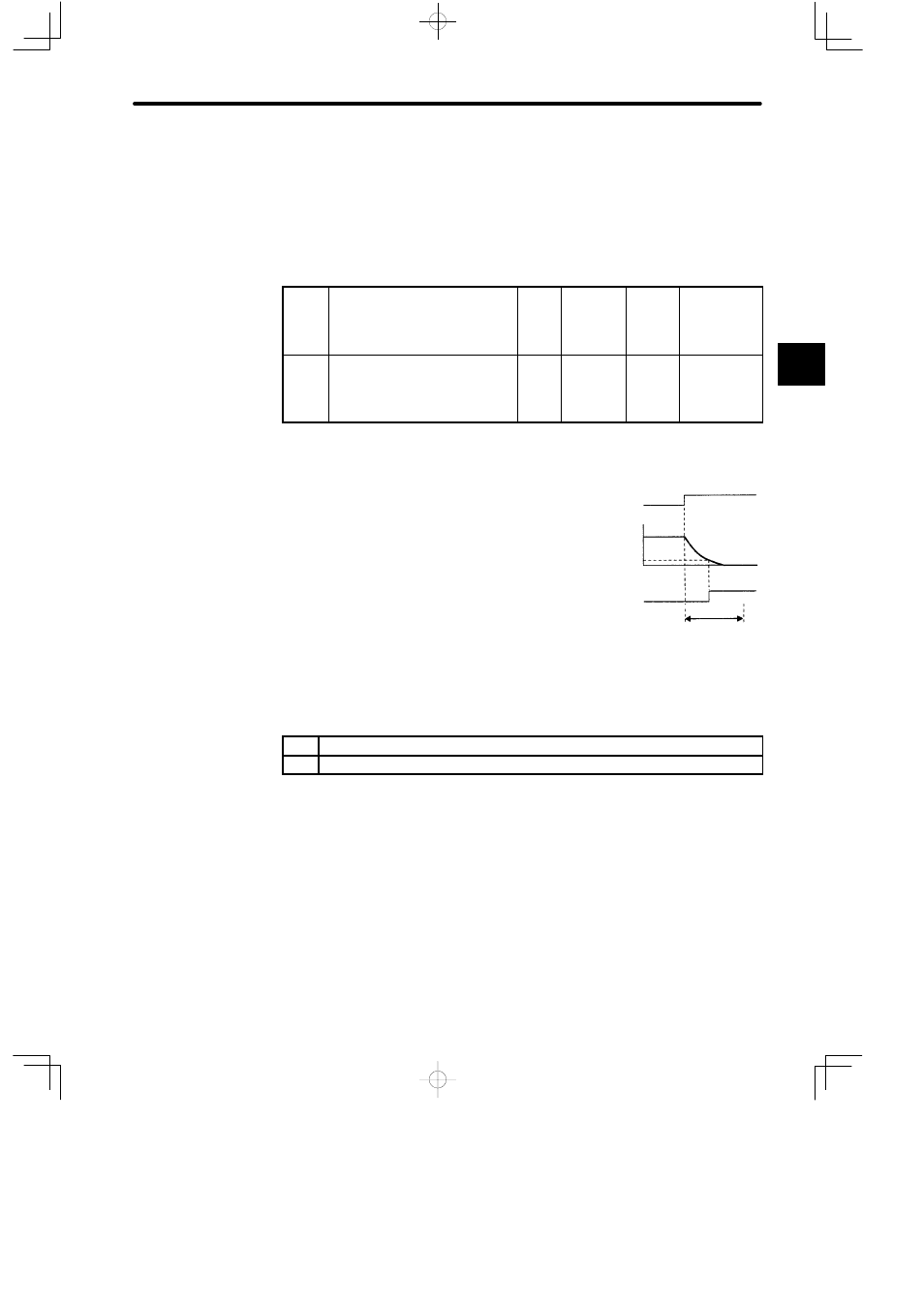
2
Brake Timing when Motor is in Stopped Status
Power OFF
by /S-ON
input or alarm
occurrence
Servo ON
Servo OFF
Motor speed
(min
−1
)
Stop by coasting
to a stop
BRKSPD
(Cn-15)
/BK output
Release
brake
Apply brake
BRKWAI
(Cn-16)
When this time elapses, BK signal is output,
regardless of motor speed.