5 setting speed bias – Yaskawa Sigma Mini User Manual
Page 96
APPLICATIONS
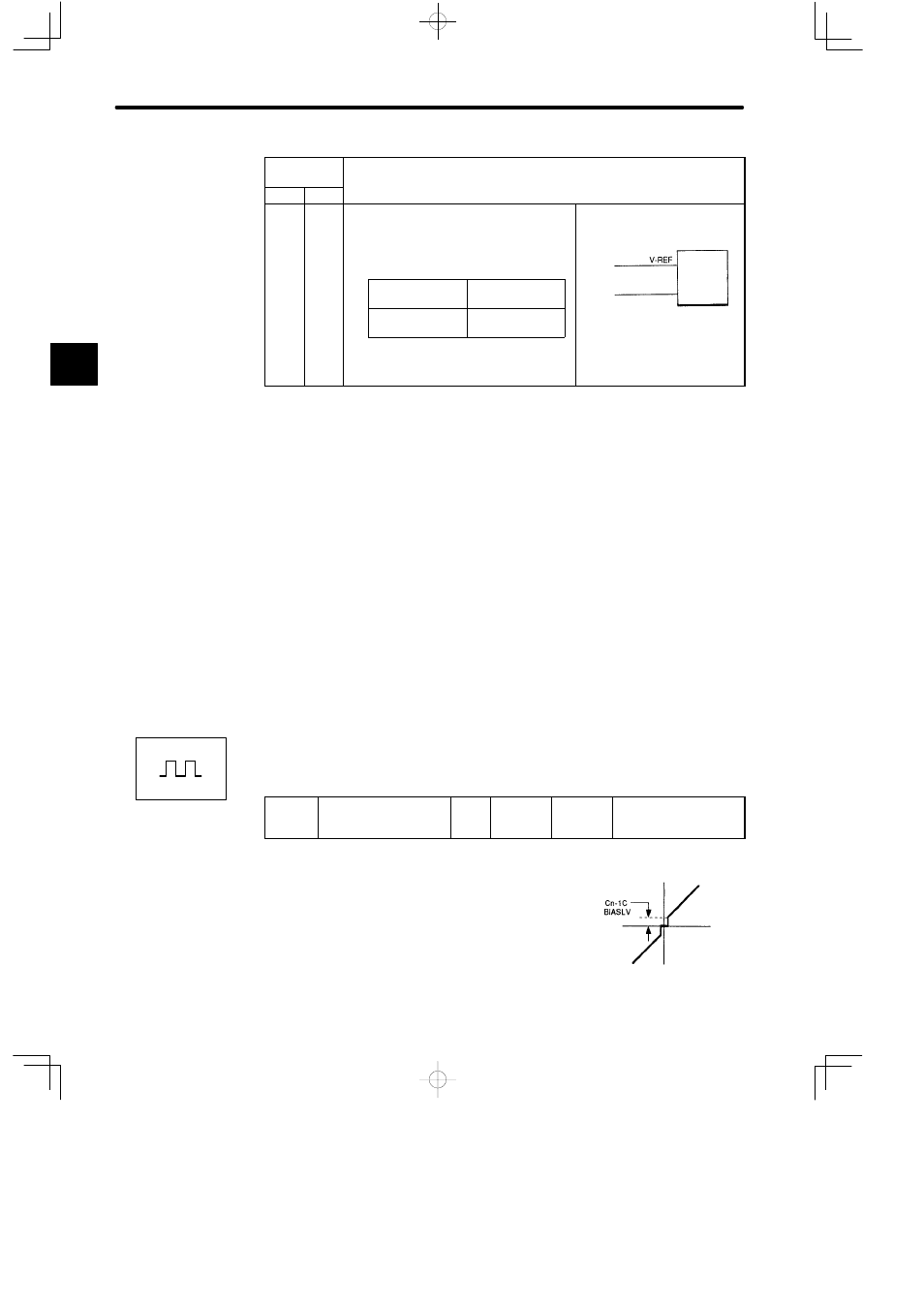
2.6.5 Setting Speed Bias
— 2-52 —
Cn-01
Setting
Control Mode
Bit B Bit A
Control Mode
Speed Control
This is normal speed control.
D
Speed reference is input from V-REF.
D
Signal /P-CON is used to switch between
P control and PI control.
Servopack
Speed
reference
P/PI
(CN1-12)
0
0
/P-CON is open
(OFF)
PI control
P/PI
changeover
(CN1 12)
(CN1-*1)
/P-CON
/P-CON is closed
(ON)
P control
(CN1- 1)
D
Torque reference input T-REF cannot be
used.
Using Proportional Control
Proportional control can be used in the following two ways.
• When operation is performed by sending speed references from the host controller to the
Servopack, the host controller can selectively use P control mode for particular conditions
only. This method can prevent the occurrence of overshoot and also shorten settling time.
For particular conditions, refer to 2.6.6 Mode Switch.
• If PI control mode is used when the speed reference has a reference offset, the motor may
rotate at a very slow speed and fail to stop even if 0 is specified as a speed reference. In this
case, use P control mode to stop the motor.
2.6.5 Setting Speed Bias
The settling time for positioning can be reduced by assigning bias to the speed reference out-
put part in the Servopack. To assign bias, use the following constant.
Cn-1C
BIASLV
Bias
Unit:
min
−1
Setting
Range: 0
to 450
Factory
Setting: 0
For Position Control
This parameter is set to assign an offset to a speed ref-
erence in the Servopack.
Use this constant to shorten settling time.
Set this parameter according to machine conditions.
2
Positions
Contact speed
reference
Error pulse