Yaskawa Sigma Mini User Manual
Page 179
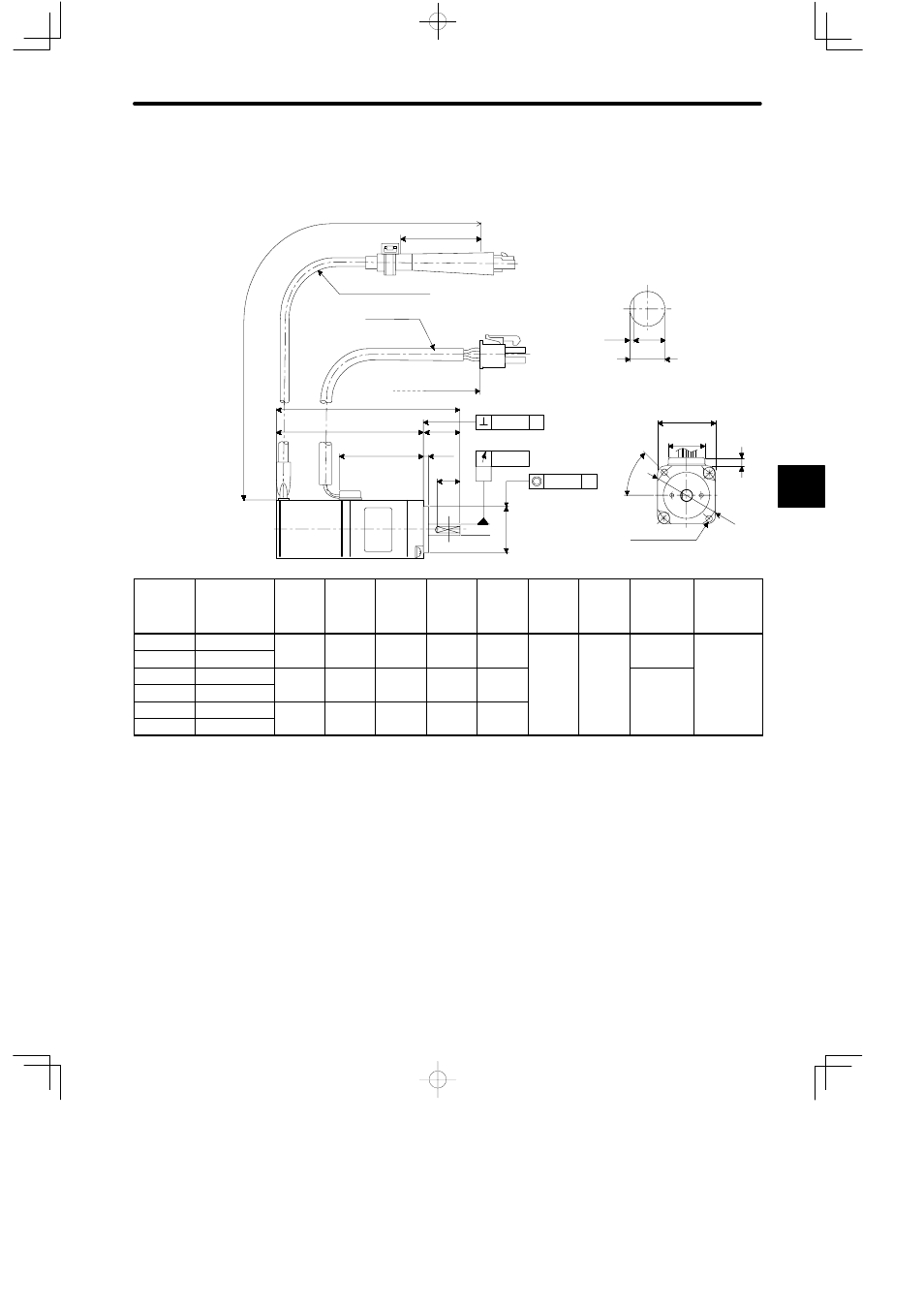
4.4Servo Drive Dimensional Drawings
— 4-29 —
Incremental Encoders without Brakes (Type SGMM-AjC31j)
• 10 W, 20 W, 30 W
L2
L1
L
0.02
0.04
A
2.5
16
10
A
φ 0.04
A
4
0.5
4.5
35 (1.38)
Encoder Leads, UL20276
300 (11.81) ±30 (1.18)
Protective Tube,
5 mm (0.20)
dia., black
300 (11.81)
± 30 (1.18)
2 x M3 tap screws,
depth: 5 (0.20)
j
25 (0.98)
16 (0.63)
(0.16)
Shaft end
(with flat seat)
(0.02)
(0.18)
(A)
(B)
(A)
(0.0015)
(0.0008)
(A): φ 5
0
−0.008
(0.197
−0.0001
−0.0005
)
(B): φ 20
0
−0.013
(0.787
+0.0004
−0.0001
)
(φ 0.0015)
(0.63)
(0.10)
(0.39)
45
°
φ 28 (φ 1.10)
Type
SGMM-
Shaft End
Specifica-
tions
L mm
(in)
L1 mm
(in)
L2 mm
(in)
Output
W (HP)
Torque
NSm
(lbSm)
Time
Rating
Rated
Speed
(min
−1
)
Allowable
Radial
Load
N (lb)
Allowable
Thrust
Load
N (lb)
A1C312
No flat seat
70
(2 6)
54
(2 13)
26.5
(1 0 )
10
(0 013)
0.032
(0 00 )
Contin-
3000
34.3 (7.7)
14.7 (3.3)
A1C313
With flat seat (2.76)
(2.13)
(1.04)
(0.013)
(0.007)
uous
(
)
(
)
A2C312
No flat seat
80
(3 1 )
64
(2 2)
36.5
(1
)
20
(0 02 )
0.064
(0 01 )
44.1 (9.9)
A2C313
With flat seat (3.15)
(2.52)
(1.44)
(0.027)
(0.014)
(
)
A3C312
No flat seat
90
(3
)
74
(2 91)
46.5
(1 83)
30
(0 0 0)
0.096
(0 022)
A3C313
With flat seat (3.54)
(2.91)
(1.83)
(0.040)
(0.022)
Note
1) The detector uses a 2048 P/R incremental encoder 2048 P/R.
2) The allowable load is applied to the shaft end.
4