7 holding brakes, Mecha – Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors User Manual
Page 108
4 Operation
4.2.7 Holding Brakes
4-18
4.2.7 Holding Brakes
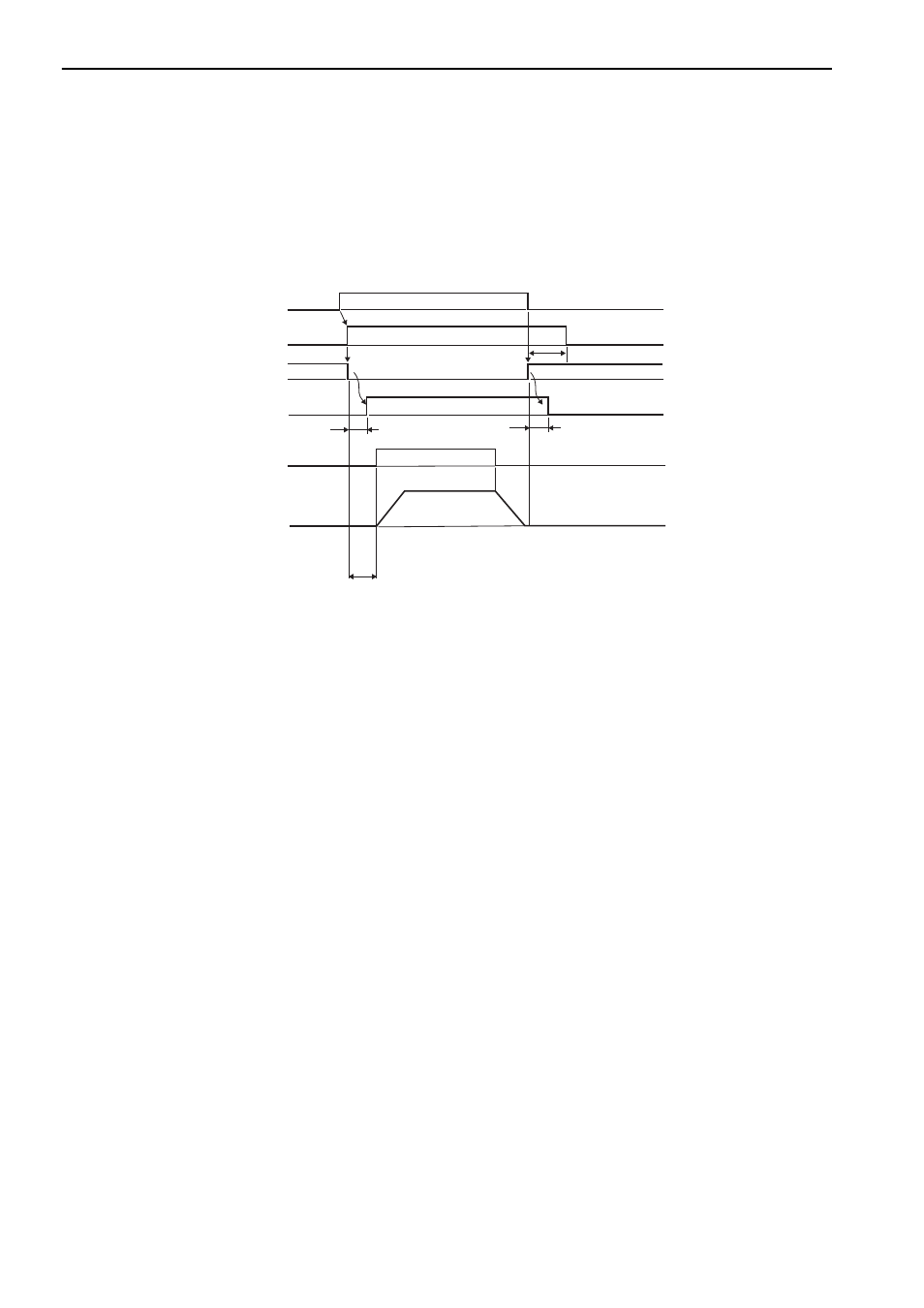
A holding brake is a brake used to hold the position of the movable part of the machine when the SERVO-
PACK is turned OFF so that movable part does not move due to gravity or external forces. The brake is not
included, so if necessary, install a holding brake on the machine.
There is a delay in the braking operation. Set the following ON/OFF timing.
∗1. For details, refer to the manual for the command option module that is connected.
∗2. The operation delay time of the brake depends on the model. Check the operation delay time of the brake being used.
∗3. After the Servo ON command has been sent and 50 ms has passed since the brake was released, output the reference
from the host controller to the SERVOPACK.
∗4. Use Pn506, Pn508, and Pn583 to set the timing of when the brake will be activated and when the servomotor power
will be turned OFF.
*2
*3
0
*2
*4
Servo ON command
Servomotor power
Brake signal (/BK)
Brake contact part
(lining)
Position reference/
Speed reference
Motor speed
OFF
OFF
OFF
OFF
OFF
OFF
ON
ON
ON
Brake release
Brake applied
Brake applied
*1
MECHA