2 linear servomotor movement direction – Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors User Manual
Page 95
4.2 Settings for Common Basic Functions
4-5
4
Operation
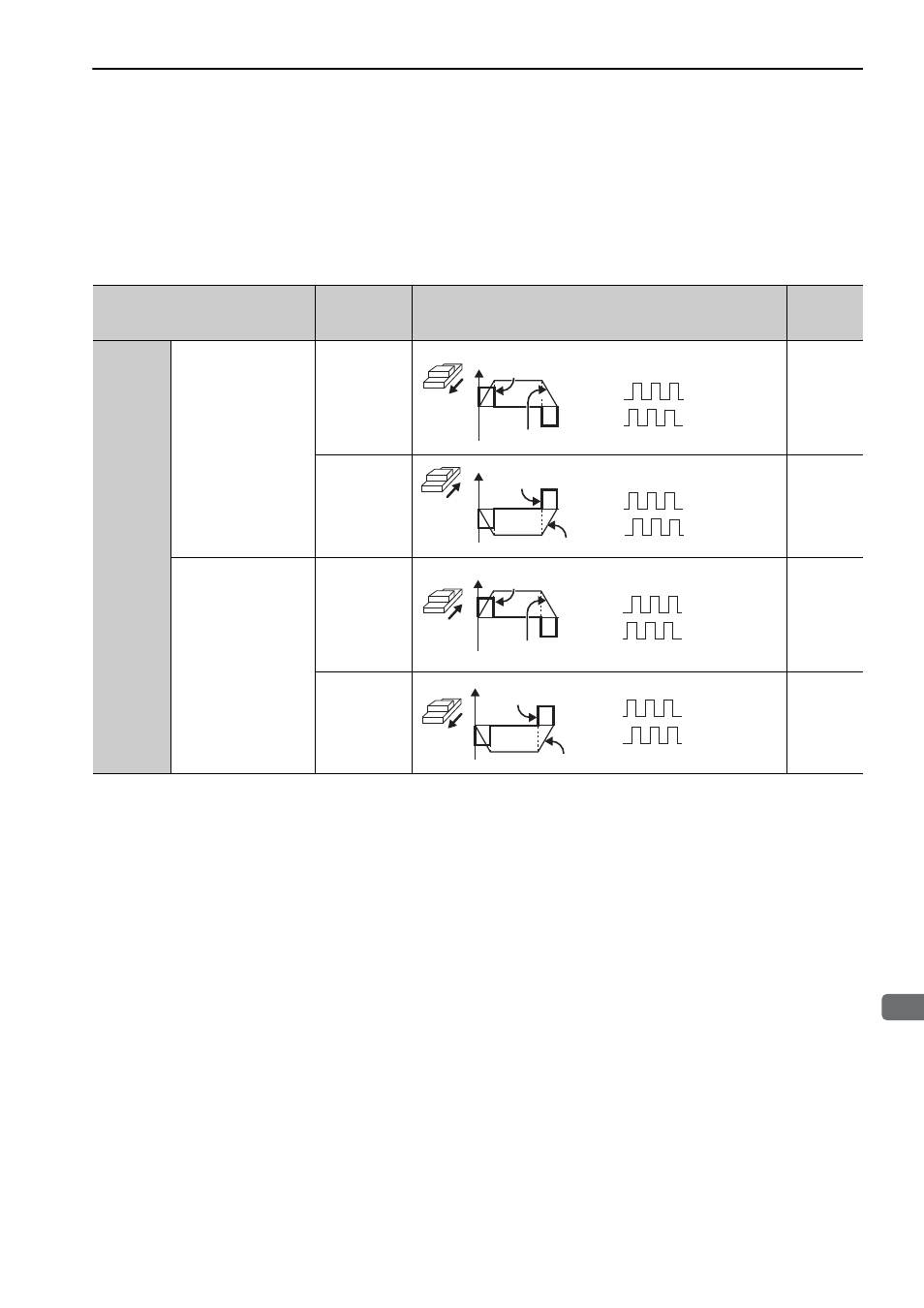
4.2.2 Linear Servomotor Movement Direction
The linear servomotor movement direction can be reversed with parameter Pn000.0. This causes the travel
direction (+, -) of the shaft to reverse, but the encoder output pulse and analog monitor signal polarity do not
change. (Refer to 5.1.3 Monitoring Analog Signals.)
Before performing this operation. Motor Phase (Pn080.1) must be set correctly. For the setting method, refer
to
Σ
-V series User’s Manual, Setup, Linear Motor (SIEP S800000 44).
Note 1. The figures in the table above show the trace waveforms for the SigmaWin+.
2. Use the Feedback Pulse Counter (Un00D) to check the linear scale count.
Parameter
Forward/
Reverse
Reference
Linear Servomotor Movement Direction and
Encoder Output Pulses
Enabled
Overtravel
(OT)
Pn000
n.
0
Standard setting
(Forward movement
is the linear scale
counting up
direction.)
[Factory setting]
Forward
reference
P-OT
Reverse
reference
N-OT
n.
1
Reverse movement
Mode
(Forward movement
is the linear scale
counting down
direction.)
Forward
reference
P-OT
Reverse
reference
N-OT
Phase B advanced
Motor movement speed
Moves in
forward
direction.
Encoder output pulse
PAO
PBO
Force reference
Motor movement speed
Time
㧗
Motor movement speed
Motor movement speed
Force reference
Phase A advanced
Encoder output pulse
PAO
PBO
Moves in
reverse
direction.
Time
㧗
Phase B advanced
Encoder output pulse
PAO
PBO
Motor movement speed
㧗
Moves in
reverse
direction.
Force reference
Motor movement speed
Time
Phase A advanced
Motor movement speed
Time
Encoder output pulse
PAO
PBO
Moves in
forward
direction.
Motor movement speed
Force reference
㧗