Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors User Manual
Page 281
8 Troubleshooting
8-30
8.3 Troubleshooting Malfunction Based on Operation and
Conditions of the Linear Servomotor
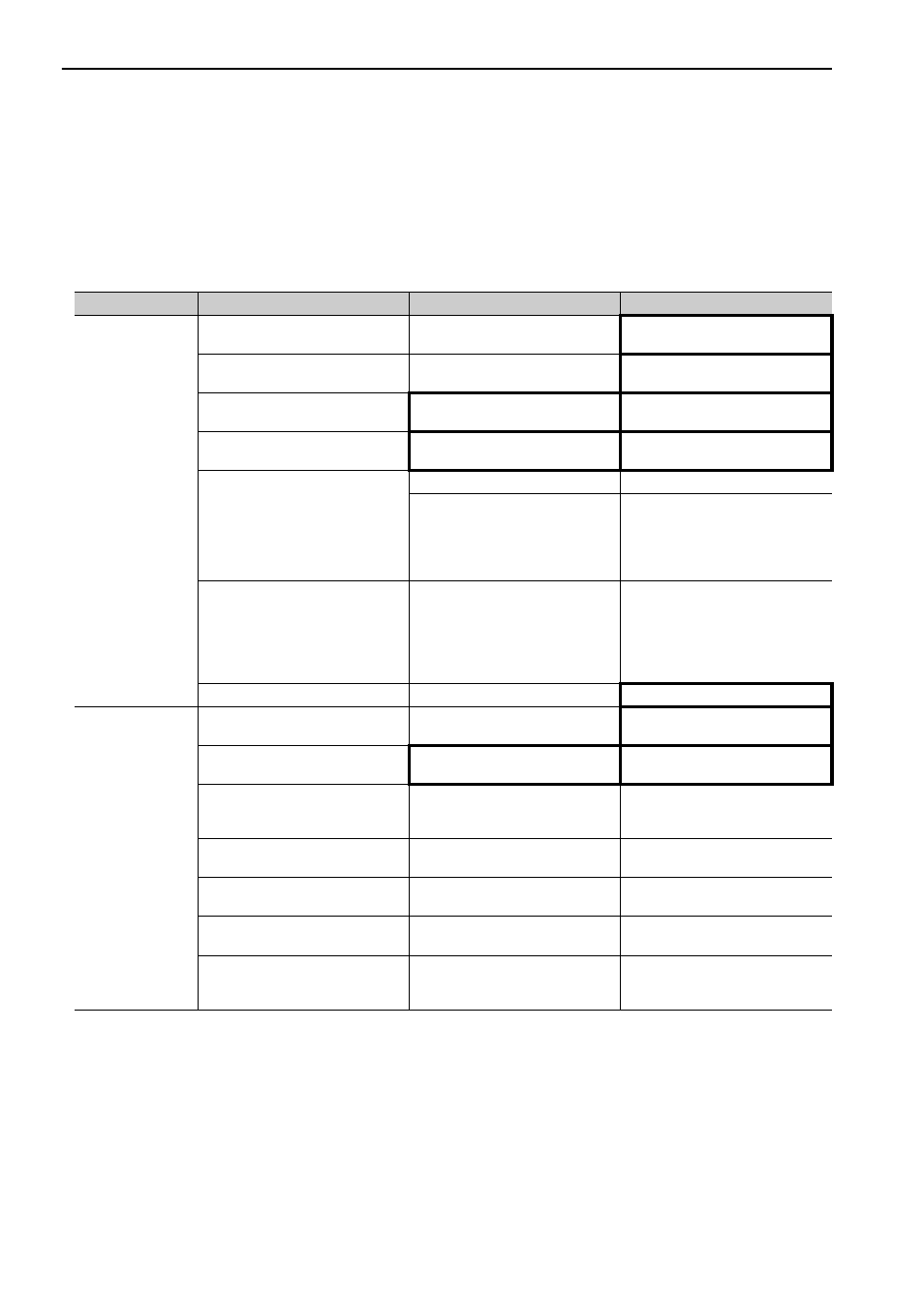
Troubleshooting for the malfunctions based on the operation and conditions of the linear servomotor is pro-
vided in this section.
Be sure to turn OFF the servo system before troubleshooting items outlined in bold in the table. .
Problem
Probable Cause
Investigative Actions
Corrective Actions
Linear
Servomotor Does
Not Start When
Using JOG
Operation or Host
Controller
Reference.
The control power supply is not
ON.
Check voltage between control
power supply terminals.
Correct the control power circuit.
The main circuit power supply is
not ON.
Check the voltage between power
supply terminals.
Correct the power circuit.
Wrong wiring or disconnection of I/
O signal connector CN1
Check if the connector CN1 is prop-
erly inserted and connected.
Correct the connector CN1 connec-
tion.
Linear servomotor or serial con-
verter unit wiring disconnected.
Check the wiring.
Correct the wiring.
The polarity detection is not exe-
cuted.
Check the parameter Pn080.
Correct the setting of Pn080.
Check the command sent from the
host controller.
When using an incremental linear
scale, send the servo ON command.
When using an absolute linear
scale, execute polarity detection
(Fn080).
The safety input signal (/HWBB1 or
/HWBB2) remains OFF.
Check the /HWBB1 or /HWBB2
input signal.
Set the /HWBB1 or /HWBB2 input
signal to ON.
When not using the safety function,
mount the safety function’s jumper
connector (provided as an acces-
sory) on the CN8.
A SERVOPACK fault occurred.
–
Replace the SERVOPACK.
Linear
Servomotor Starts
in JOG Operation
but Does Not Start
by Host Controller
Reference.
Overloaded
Run under no load.
Reduce load or replace with a larger
capacity linear servomotor.
Speed/position references not input Check reference input pins.
Input speed/position references cor-
rectly.
Settings for Pn50A and Pn50B
"Input Signal Selection" are incor-
rect.
Check settings of parameters
Pn50A and Pn50B.
Correct the settings for Pn50A and
Pn50B "Input Signal Selection."
Linear scale type differs from
parameter setting (Pn002.2).
Check the linear scale type and set-
ting of parameter Pn002.2.
Set parameter Pn002.2 to the linear
scale type being used.
A servo ON command was not
input.
Check the command sent from the
host controller.
Send a servo ON command.
A sensor ON command was not
input.
Check the command sent from the
host controller.
Send the command in the correct
sequence to the SERVOPACK.
The forward run prohibited (P-OT)
or reverse run prohibited (N-OT)
input signal is turned OFF.
Check P-OT or N-OT input signal.
Turn P-OT or N-OT input signal
ON.