3 jog operation (fn002), Caution, 1) settings before operation – Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors User Manual
Page 215: 2) operating procedure
6 Utility Functions (Fn)
6-4
6.3 JOG Operation (Fn002)
JOG operation is used to check the operation of the linear servomotor under speed control without connecting
the SERVOPACK to the host controller.
(1) Settings before Operation
The following settings are required before performing JOG operation.
• If a servo ON command is input, send a servo OFF command.
• Considering the operating range of the machine, set the JOG operation speed in Pn383.
(2) Operating Procedure
Follow the steps below to set the JOG speed. The following example is given when the movement direction of
linear servomotor is set as Pn000.0 = 0 (linear scale counting up direction is regarded as the forward run).
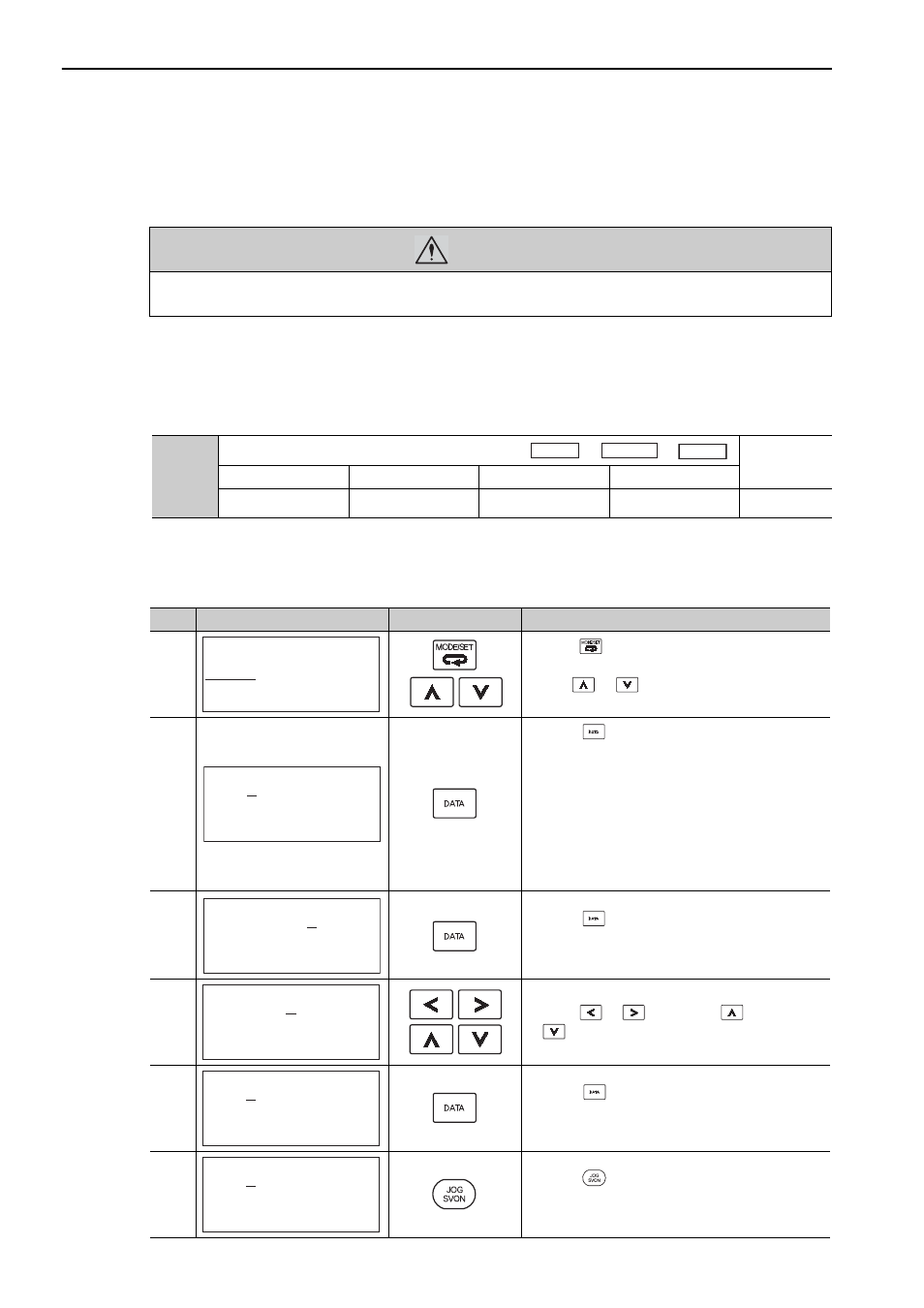
CAUTION
While the SERVOPACK is in JOG operation, the overtravel function will be disabled. Consider the operating range
of the machine when performing JOG operation for the SERVOPACK.
Pn383
JOG Speed
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 10000
1 mm/s
500
Immediately
Setup
Speed
Position
Force
Step
Display Example
Keys
Operation
1
Press the
Key to view the main menu for the util-
ity function mode.
Use the
or
Key to move through the list,
select Fn002.
2
Press the
Key. The display is switched to the
execution display of Fn002.
Note:
If the display is not switched and “NO-OP” is dis-
played in the status display, change the following set-
tings. (Refer to 6.12.)
• If Write Prohibited is set in Fn010:
→ Cancel the Write Prohibited setting.
• If a servo ON command is input:
→ Send a servo OFF command.
3
Press the
Key.
The cursor moves to the setting side (the right side) of
Pn383 (JOG speed).
4
Press the
or
Key and the
or
Key to set the JOG speed to 1000 (mm/s).
5
Press the
Key.
The setting value is entered, and the cursor moves to
the parameter number side (the left side).
6
Press the
Key.
“RUN” is displayed in the status display, and power
is applied to the linear servomotor.
㧮㧮ޓޓޓޓޓ㧙㧲㨁㧺㧯㨀㧵㧻㧺㧙
㧲㨚㧜㧜㧜㧦㧭㨘㨙ޓ㧴㨕㨟㨠㨛㨞㨥
㧲㨚㧜㧜㧞㧦㧶㧻㧳
㧲㨚㧜㧜㧟㧦㨆㧙㧿㨑㨍㨞㨏㨔
㧲㨚㧜㧜㧠㧦㧼㨞㨛㨓㨞㨍㨙ޓ㧶㧻㧳
㧮㧮ޓޓޓޓޓޓޓޓޓޓ㧙㧶㧻㧳㧙
㧼㨚㧟㧤㧟㧩㧜㧜㧡㧜㧜ޓ
㨁㨚㧜㧜㧜㧩ޓ㧜㧜㧜㧜㧜
㨁㨚㧜㧜㧞㧩ޓ㧜㧜㧜㧜㧜
㨁㨚㧜㧜㧰㧩㧜㧜㧜㧜㧜㧜㧜㧜
㧮㧮ޓޓޓޓޓޓޓޓޓޓ㧙㧶㧻㧳㧙
㧼㨚㧟㧤㧟㧩㧜㧜㧡㧜㧜ޓ
㨁㨚㧜㧜㧜㧩ޓ㧜㧜㧜㧜㧜
㨁㨚㧜㧜㧞㧩ޓ㧜㧜㧜㧜㧜
㨁㨚㧜㧜㧰㧩㧜㧜㧜㧜㧜㧜㧜㧜
㧮㧮ޓޓޓޓޓޓޓޓޓޓ㧙㧶㧻㧳㧙
㧼㨚㧟㧤㧟㧩㧜㧝㧜㧜㧜ޓ
㨁㨚㧜㧜㧜㧩ޓ㧜㧜㧜㧜㧜
㨁㨚㧜㧜㧞㧩ޓ㧜㧜㧜㧜㧜
㨁㨚㧜㧜㧰㧩㧜㧜㧜㧜㧜㧜㧜㧜
㧼㨚㧟㧤㧟㧩㧜㧝㧜㧜㧜ޓ
㨁㨚㧜㧜㧜㧩ޓ㧜㧜㧜㧜㧜
㨁㨚㧜㧜㧞㧩ޓ㧜㧜㧜㧜㧜
㨁㨚㧜㧜㧰㧩㧜㧜㧜㧜㧜㧜㧜㧜
㧮㧮ޓޓޓޓޓޓޓޓޓޓ㧙㧶㧻㧳㧙
㧾㨁㧺ޓޓޓޓޓޓޓޓޓ㧙㧶㧻㧳㧙
㧼㨚㧟㧤㧟㧩㧜㧝㧜㧜㧜ޓ
㨁㨚㧜㧜㧜㧩ޓ㧜㧜㧜㧜㧜
㨁㨚㧜㧜㧞㧩ޓ㧜㧜㧜㧜㧜
㨁㨚㧜㧜㧰㧩㧜㧜㧜㧜㧜㧜㧜㧜