4) vibration detection function – Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors User Manual
Page 153
5.1 Adjustments and Basic Adjustment Procedure
5-9
5
Adjustments
Related Parameter
Related Alarm
(4) Vibration Detection Function
Set the vibration detection function to an appropriate value. For details on how to set the vibration detection
function, refer to 6.16 Vibration Detection Level Initialization (Fn01B).
(5) Excessive Position Error Alarm Level at Servo ON
If the linear servomotor is turned ON when position error pulses remain, the linear servomotor will return to
the home position and reset the number of pulses to zero. To prevent the linear servomotor from moving sud-
denly, set the appropriate level for the Excessive Position Error alarm when the linear servomotor is ON to
restrict operation of the linear servomotor.
Related Parameters
Related Alarms
When an alarm occurs, refer to 8 Troubleshooting and take the corrective actions.
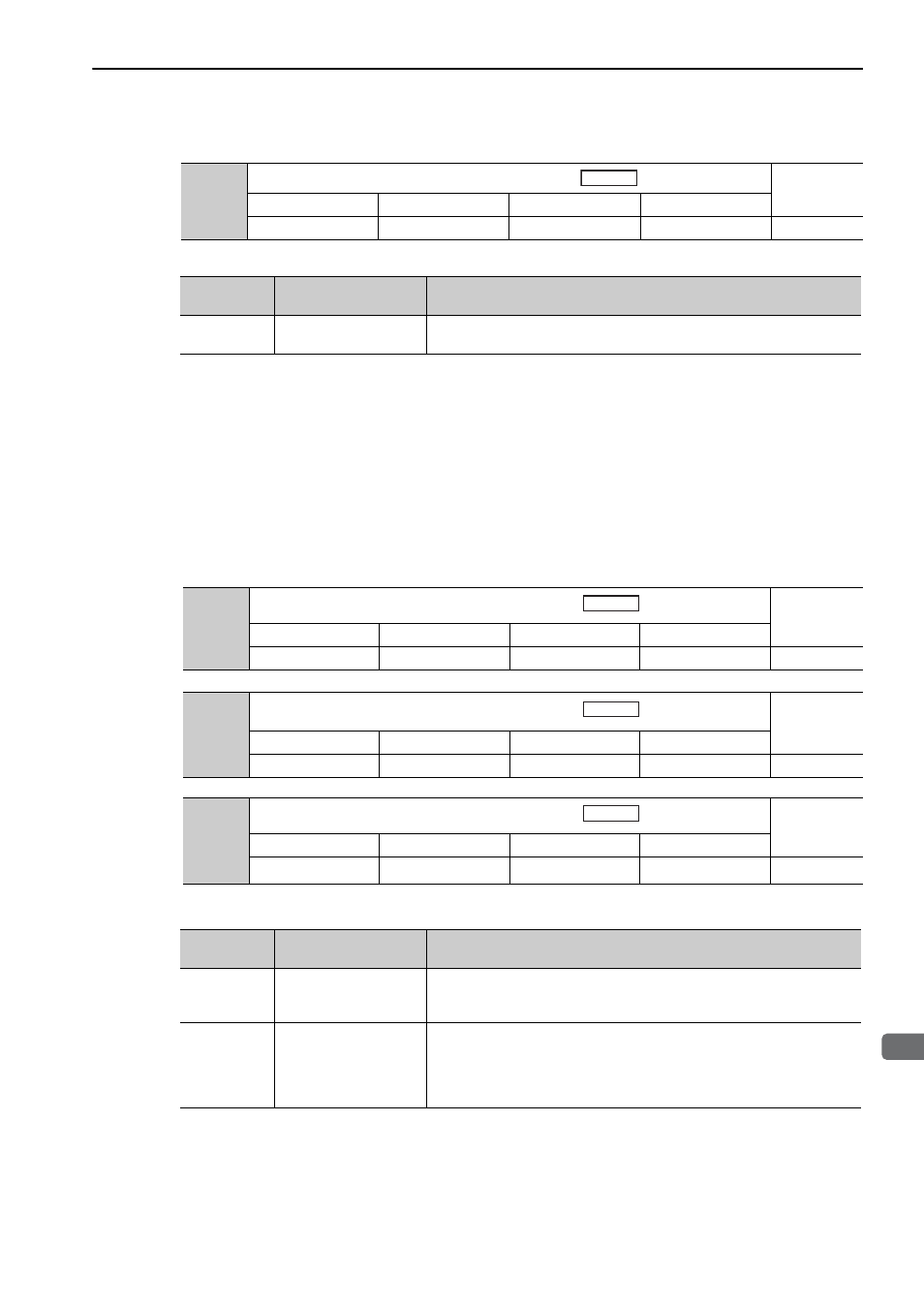
Pn520
Excessive Position Error Alarm Level
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
1 to 1073741823
1 reference unit
5242880
Immediately
Setup
Alarm
Display
Alarm Name
Alarm Contents
A.d00
Position Error Pulse
Overflow
This alarm occurs when the number of position error pulses exceeds the
value set for parameter Pn520 (Excessive Position Error Alarm Level).
Position
Pn526
Excessive Position Error Alarm Level at Servo ON
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
1 to 1073741823
1 reference unit
5242880
Immediately
Setup
Position
Pn528
Excessive Position Error Warning Level at Servo
ON
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
10 to 100
1%
100
Immediately
Setup
Pn584
Speed Limit Level at Servo ON
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 10000
1 mm/s
10000
Immediately
Setup
Position
Position
Alarm
Display
Alarm Name
Alarm Contents
A.d01
Position Error Pulse
Overflow Alarm at Servo
ON
Occurs if the servo ON command is received when the number of position
error pulses is greater than the set value of Pn526.
A.d02
Position Error Pulse
Overflow Alarm by
Speed Limit at Servo ON
After a position error pulse has been input, Pn584 limits the speed if the
servo ON command is received. If Pn584 limits the speed in such a state,
this alarm occurs when the position references are input and the number of
position error pulses exceeds the value set for parameter Pn520 (Excessive
Position Error Alarm Level).