Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors User Manual
Page 130
Advertising
4 Operation
4.5.4 Absolute Linear Scale Reception Sequence
4-40
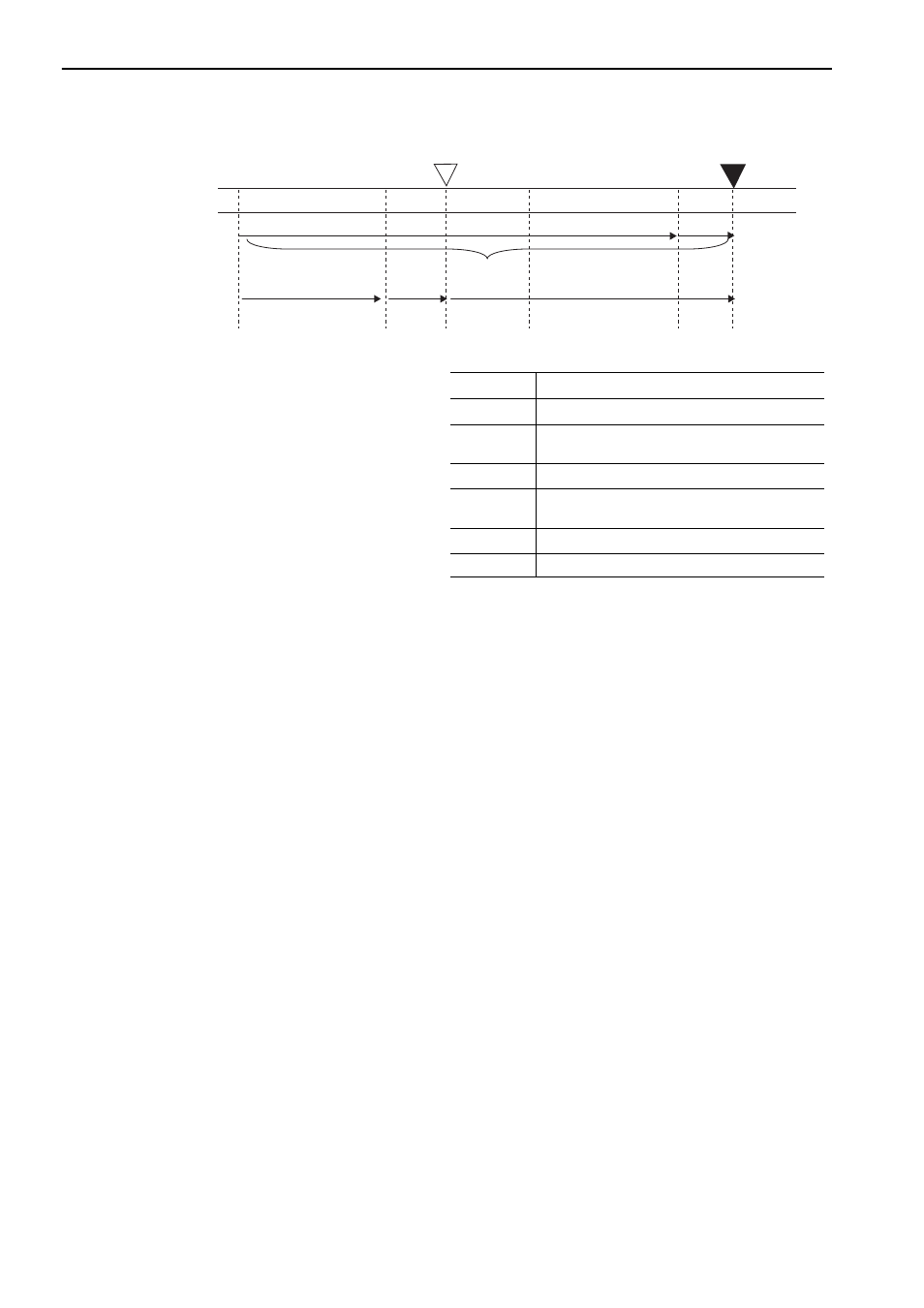
Final absolute data P
M
is calculated by the follow-
ing formula.
Note: This formula also applies for the reverse
direction mode (Pn000.0 = 1).
Note: When host controller receives the data of absolute linear scale, do not perform counter reset using the output of PCO
signal.
Current position
Reference position
Reference
value
Value of
M
O
M
S
M
S
×
R
M
O
×
R
0
0
1
2
1
2
3
(M
s
)
3
(M
O
)
P
o
P
S
P
E
P
M
P
E
Current position of linear scale
M
O
Serial data of current position
P
O
Number of initial incremental pulses of current
position
M
S
Serial data of reference position
P
S
Number of initial incremental pulses of reference
position
P
M
Current position required for the user’s system
R
1048576
P
E
= M
O
× R + P
O
P
M
= P
E
− M
S
× R − P
S
Advertising