Yaskawa Sigma-5 User Manual: Design and Maintenance - Linear Motors User Manual
Page 284
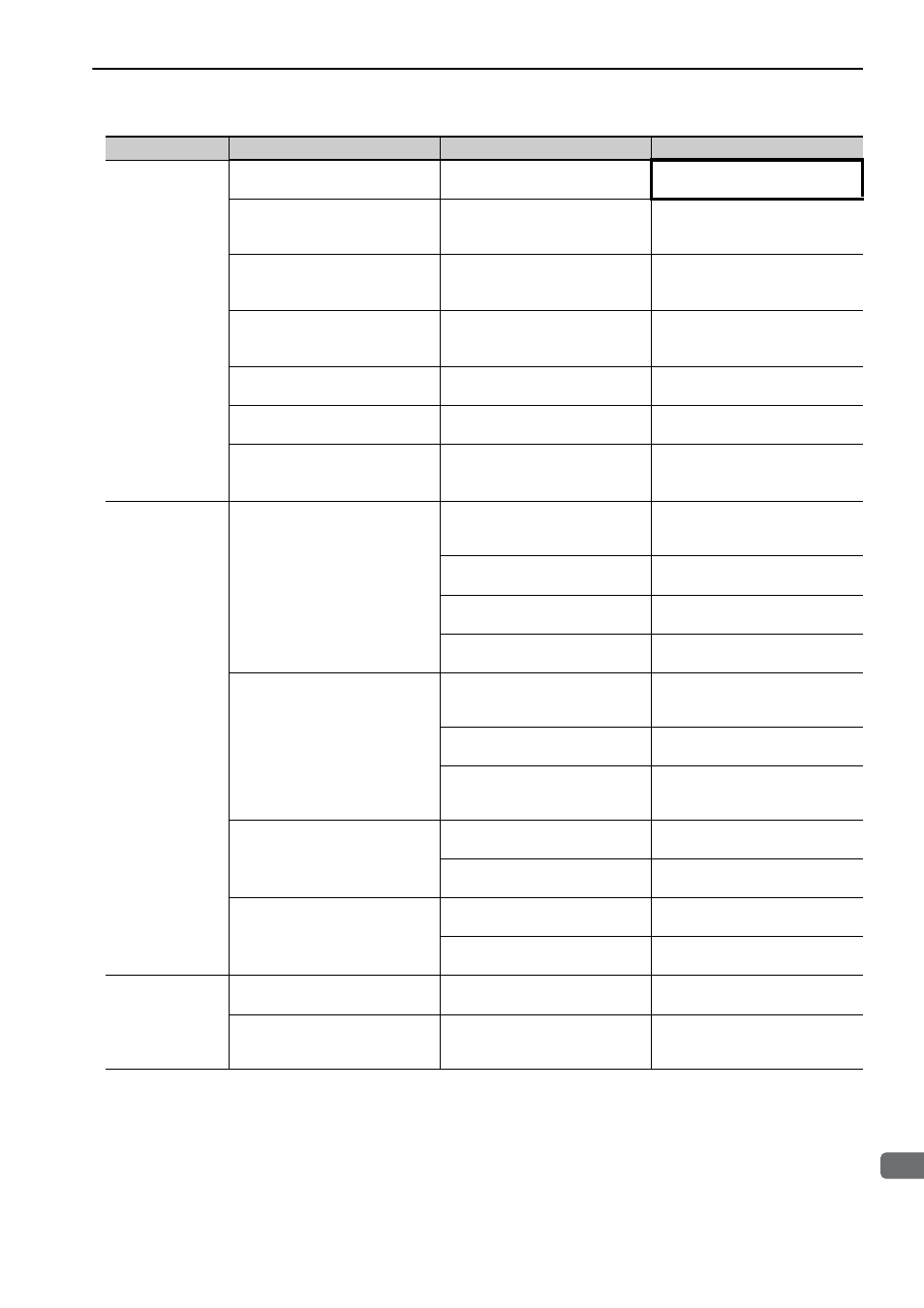
8.3 Troubleshooting Malfunction Based on Operation and Conditions of the Linear Servomotor
8-33
8
T
roubleshooting
High
Speed
Overshoot on
Starting and
Stopping
Unbalanced servo gains
Check to see if the servo gains have
been correctly adjusted.
Execute the advanced autotuning.
Speed loop gain value (Pn100) is
too high.
Check the speed loop gain value
(Pn100).
Factory setting: Kv = 40.0 Hz
Reduce the speed loop gain
(Pn100).
Position loop gain value (Pn102) is
too high.
Check the position loop gain value
(Pn102).
Factory setting: Kp = 40.0/s
Reduce the position loop gain
(Pn102).
Incorrect speed loop integral time
constant (Pn101) setting
Check the speed loop integral time
constant (Pn101) setting.
Factory setting: Ti = 20.0 ms
Correct the speed loop integral time
constant (Pn101) setting.
Incorrect mass ratio (Pn103) setting Check the mass ratio (Pn103) set-
ting.
Correct the mass ratio (Pn103) set-
ting.
The force reference is saturated.
Check the force reference wave-
form.
Use the mode switch function.
The force limit (Pn483, Pn484) is
set to the initial value.
Initial value of force limit:
Pn483 = 30%
Pn484 = 30%
Set Pn483 and Pn484 (Force Limit)
to an appropriate value.
Overtravel (OT)
Forward or reverse run prohibited
signal is input.
Check if the voltage of input signal
external power supply (+24 V) is
correct.
Correct external power supply (+24
V) voltage.
Check if the overtravel limit switch
operates properly.
Correct the overtravel limit switch.
Check if the overtravel limit switch
is connected correctly.
Correct the overtravel limit switch
wiring.
Check the settings for Pn50A and
Pn50B.
Set the parameters correctly.
Forward or reverse run prohibited
signal is malfunctioning.
Check the fluctuation of the input
signal external power supply (+24
V) voltage.
Stabilize the external power supply
(+24 V) voltage.
Check if the overtravel limit switch
operates correctly.
Stabilize the operation of the over-
travel limit switch.
Check if the overtravel limit switch
wiring is correct. (check for dam-
aged cables or loosen screws.)
Correct the overtravel limit switch
wiring.
Incorrect forward or reverse run
prohibited signal (P-OT/N-OT)
allocation (parameters Pn50A.3,
Pn50B.0)
Check if the P-OT signal is allo-
cated in Pn50A.3.
If another signal is allocated in
Pn50A.3, select P-OT.
Check if the N-OT signal is allo-
cated in Pn50B.0.
If another signal is allocated in
Pn50B.0, select N-OT.
Incorrect servomotor stop method
selection
Check Pn001.0 and Pn001.1 when
the linear servomotor power is OFF.
Select a linear servomotor stop
method other than “coast to stop.”
Check Pn001.0 and Pn001.1 when
in force control.
Select a linear servomotor stop
method other than “coast to stop.”
Improper Position
to Stop by
Overtravel (OT)
Signal
Improper limit switch position and
dog length
−
Install the limit switch at the
appropriate position.
The overtravel limit switch position
is too short for the coasting
distance.
−
Install the overtravel limit switch at
the appropriate position.
Problem
Probable Cause
Investigative Actions
Corrective Actions