Li (linear interpolation distance), Linear interpolation distance), Motion – Yaskawa SMC–4000 User Manual
Page 155
145
SMC–4000 User Manual
LI (Linear Interpolation Distance)
[Motion]
DESCRIPTION:
The LI a,b,c,d command specifies the incremental distance of travel for each axis in the Linear
Interpolation (LM) mode. LI parameter are relative distances given with respect to the current axis
positions. Up to 511 LI specifications may be given ahead of the Begin Sequence (BGS) command.
Additional LI commands may be sent during motion when the controller sequence buffer frees additional
spaces for new vector segments. The
LE (Linear Interpolation End)
command must be given after the
last LI specification in a sequence, it causes deceleration to a stop at the last LI command. It is the
responsibility of the user to keep enough LI segments in the controller sequence buffer to ensure
continuous motion.
LM (Linear Interpolation Mode)
returns the available spaces for LI segments that can be sent to the buffer.
511 returned means the buffer is empty and 511 LI segments can be sent. A zero means the buffer is full
and no additional segments can be sent. It should be noted that the controller computes the vector speed
based on the axes specified in the LM mode. For example, LM ABC designates linear interpolation for the
A, B, and C axes.The speed of these axes will be computed from VS
2
=AS
2
+BS
2
+CS
2
, where AS, BS and
CS are the speed of the A, B, and C axes. If the LI command specifies only A and B, the speed of C will still
be used in the vector calculations. The controller always uses the axis specifications from LM, not LI, to
compute the speed. The parameter n is optional and can be used to define the vector speed that is attached
to the motion segment.
The LI command will apply to the selected coordinate system, S or T. To select the coordinate system, use
the command CAS or CAT.
ARGUMENTS: LI n,n,n,n, <o> p
or
LIA=n
where
n is a signed integers in the range -8,388,607 to 8,388,607 and represent incremental move distance.
o specifies a vector speed to be taken into effect at the execution of the linear segment. s is an unsigned
even integer between 0 and 12,000,000 for servo motor operation and between 0 and 3,000,000 for stepper
motors.
p specifies a vector speed to be achieved at the end of the linear segment. Based on vector accel and decel
rates, o is an unsigned even integer between 0 and 8,000,000.
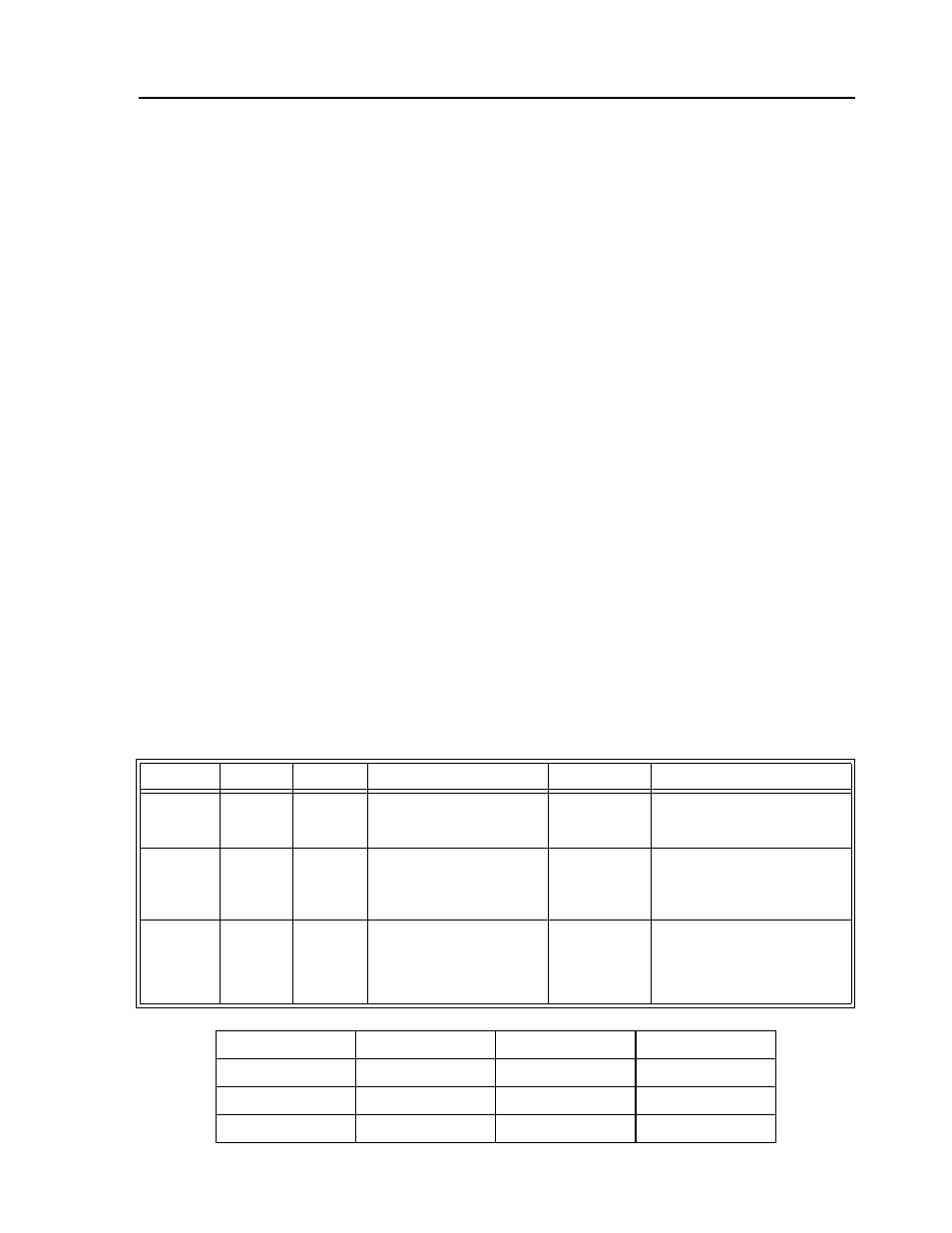
USAGE:
Argument
Min
Max
Note
Example
Meaning
n
-8388607
8388607
The incremental move
distance.
LI 500, 200
500 encoder count move on the
X axis, 200 count move on the Y
axis.
o
0
12000000
Vector speed to be taken into
effect at the execution of this
segment.
LI 500 <40000
500 encoder count move on the
X axis. Change to a vector
speed of 40000 counts per
second.
p
0
8000000
Vector speed to be taken into
effect at the end of this
segment.
LI 500 >40000
500 encoder count move on the
X axis. Change to a vector
speed of 40000 counts per
second at the end of the
segment.
While Moving
Yes
Default Value
-
In a Program
Yes
Default Format
-
Command Line
Yes
Controller Usage
All controllers