Command summary - linear interpolation, Example linear interpolation motion – Yaskawa SMC–4000 User Manual
Page 281
271
SMC–4000 User Manual
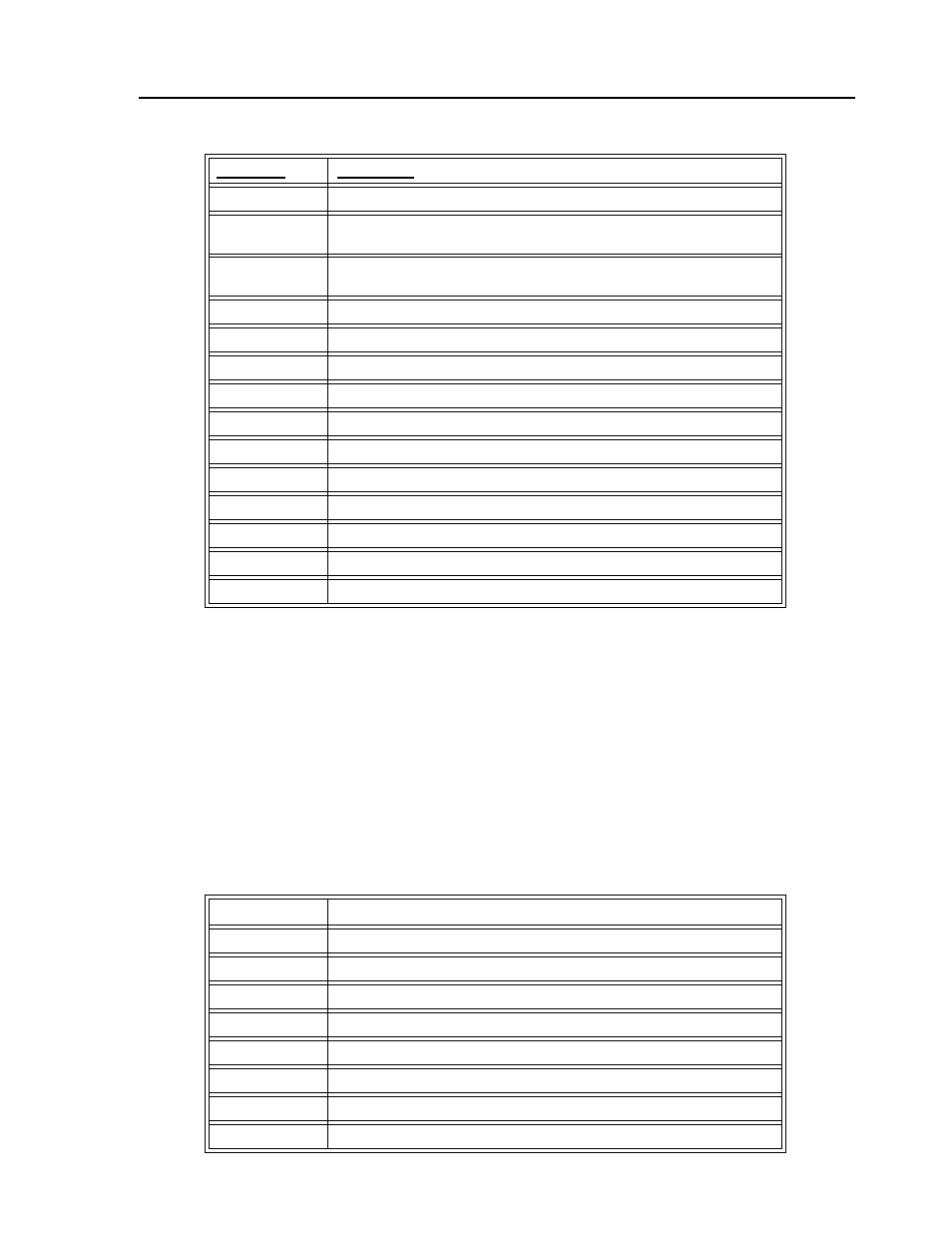
Command Summary - Linear Interpolation
To illustrate the ability to interrogate the motion status, consider the first motion segment of our example,
#LMOVE, where the X axis moves toward the point X=5000. Suppose that when X=3000, the controller
is interrogated using the command ‘MG _AV’. The returned value will be 3000. The value of _CS and
_VPX will be zero.
Example
Linear Interpolation Motion
In this example, the XY system is required to perform a 90° turn. In order to slow the speed around the corner,
we use the AV 4000 trippoint, which slows the speed to 1000 count/s. Once the motors reach the corner, the
speed is increased back to 4000 cts / s.
Command
Description
LM abcd
Specify axes for linear interpolation
LM?
Returns number of available spaces for linear segments in SMC–4000
sequence buffer. Zero means buffer full. 511 means buffer empty.
LI abcd < n
Specify incremental distances relative to current position, and assign vector
speed n.
VS n
Specify vector speed
VA n
Specify vector acceleration
VD n
Specify vector deceleration
VR n
Specify the vector speed ratio
BGS
Begin Linear Sequence
CS
Clear sequence
LE
Linear End- Required at end of LI command sequence
MG_LE
Returns the length of the vector (resets after 2147483647)
AMS
Trippoint for After Sequence complete
AV n
Trippoint for After Relative Vector distance, n
VT
Motion smoothing constant for vector moves
Instruction
Interpretation
#LMOVE
Label
DP 0,0
Define position of X andY axes to be 0.
LMXY
Define linear mode between X and Y axes.
LI 5000,0
Specify first linear segment
LI 0,5000
Specify second linear segment
LE
End linear segments
VS 4000
Specify vector speed
BGS
Begin motion sequence