Detailed explanation – Yaskawa MotionSuite Series Machine Controller Programming Manual User Manual
Page 131
MotionSuite™ Series Machine Controller Programming Manual
Chapter 3: Advanced Programming Methods
3-46
3.2.7
Interpolation Deceleration Time Change (IDC) Command
! Outline
The Interpolation Deceleration Time Change (IDC) command sets up the deceleration
time for when interpolation feed commands (MVS, MCC/MCW, SKP) are executed. It
can be set freely with the motion program.
! Detailed Explanation
The IDC command method is shown as follows:
The interpolation deceleration time is the time between the speed set up by the FMX
command, until stop.
• When the IDC command is not executed, the deceleration time constant = 0
(rectangle)
• The deceleration time changed according to the IDC command is valid until being
reset by the next IDC command.
• A designating range of the IDC command is as indicated below:
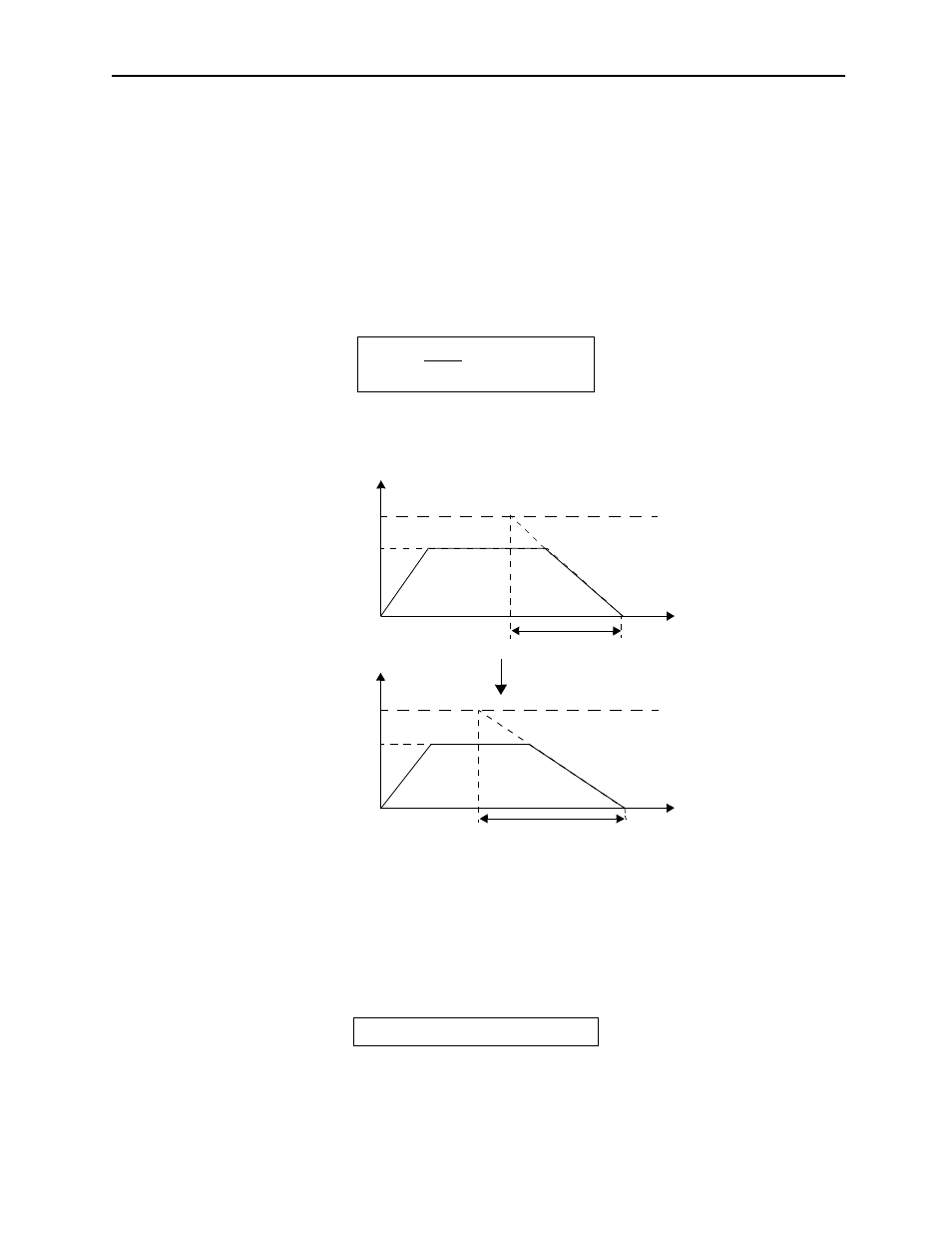
IDC T--;
Deceleration Time
v
FMX set speed
F command speed
Before deceleration time change
t
FMX set speed
F command speed
v
After deceleration time change
t
Figure 3.26 Interpolation Deceleration Time Change (IDC)
0 ~ 32767 msec