2 motion programming method, 1 input format ! motion program sample – Yaskawa MotionSuite Series Machine Controller Programming Manual User Manual
Page 18
MotionSuite™ Series Machine Controller Programming Manual
Chapter 1: Motion Programmming Outline
1-9
1.2 Motion Programming Method
This section deals with the basic rules for creating motion programs. Read this section
thoroughly prior to program execution.
1.2.1
Input Format
! Motion Program Sample
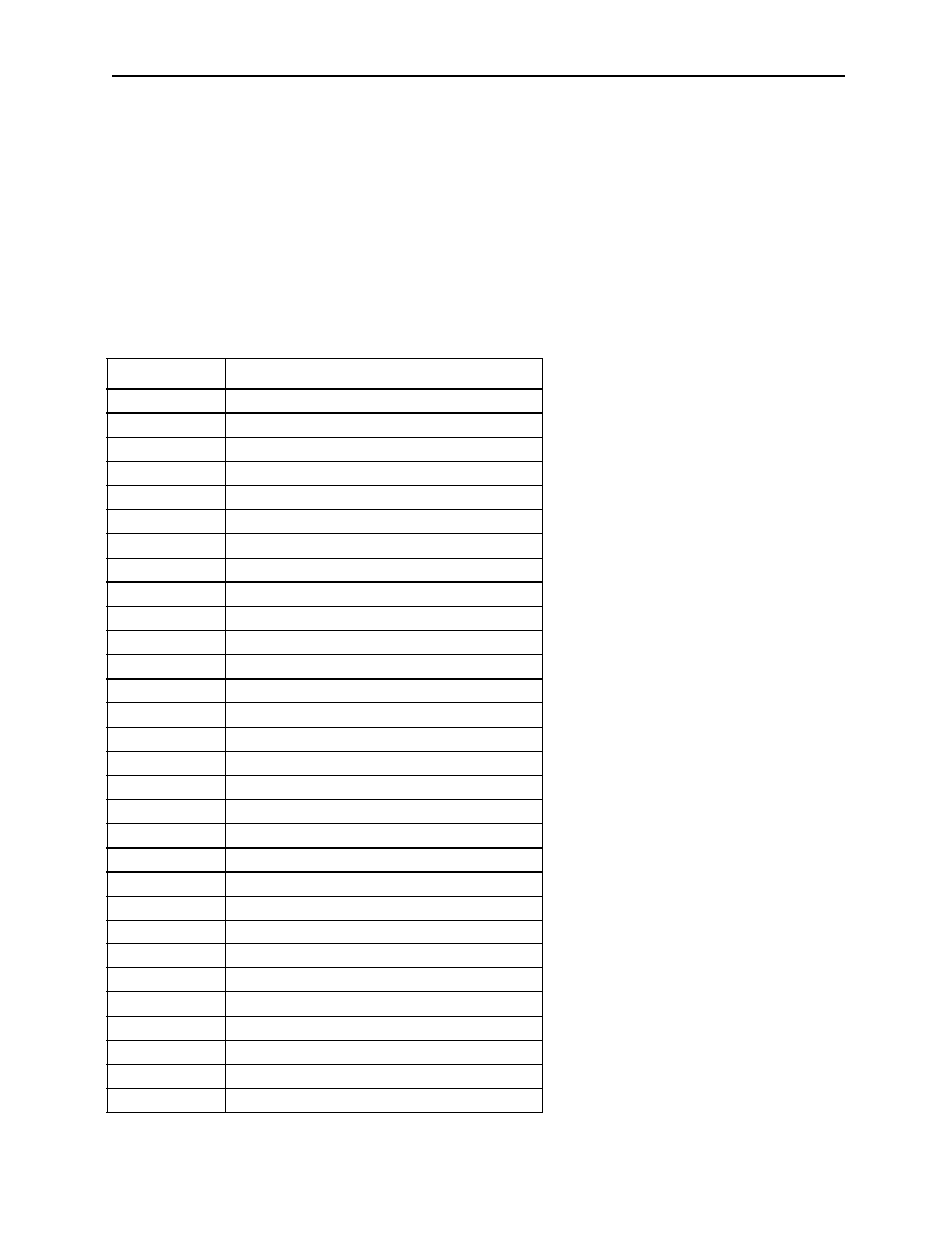
Motion programs are created in variable-length block format.
Program Sample
Block Number
Program
00001
MPM001"sample”
...Program number and comment
00002
FMX=T1000000;
...Interpolation feed high-speed setting
00003
IAC=T100;
...Interpolation feed acceleration time setting
00004
IDC=T100;
...Interpolation feed deceleration time setting
00005
VEL [X1]10000 [Y1]2000 [Z1]3000;
...Feed speed setting
00006
INC;
...Incremental mode command
00007
MOV [X1]100.[Y1]150.[Z1]200.;
...Fast feed
00008
MVS [X1]100.[Y1]50.F500000;
...Linear interpolation
00009
IOW IW0011=1;
...
00010
MW0100=(MW0110*100+50)/100;
...
00011
MW0200=(MW0210*100+50)/100;
...
00012
ABS;
...
00013
MOV [X1]MW0100 [Y1]MW0200;
...
00014
POS [X1]0 [Y1]0
...
00015
PFORK LA01, LA02, LA03, LA04
...Parallel operation command
00016
LA01: INC;
...Label
00017
MOV [X1]1000.;
...
00018
JOINTO LA05;
...
00019
LA02: INC;
...
00020
MOV [X1]2000.;
...
00021
JOINTO LA05;
...
00022
LA03: ABS;
...
00023
MV S[Z1]1500 F50000;
...
00024
MW1000=12345;
...
00025
JOINTO LA05;
...
00026
LA04: MW1100=1000;
...
00027
IOW IB101==1;
...
00028
JOINTO LA05;
...
00029
LA05:PJOINT
...Closes parallel operation command
00030
END;
...Closes program