Yaskawa MotionSuite Series Machine Controller Programming Manual User Manual
Page 57
MotionSuite™ Series Machine Controller Programming Manual
Chapter 2: Motion Commands
2-16
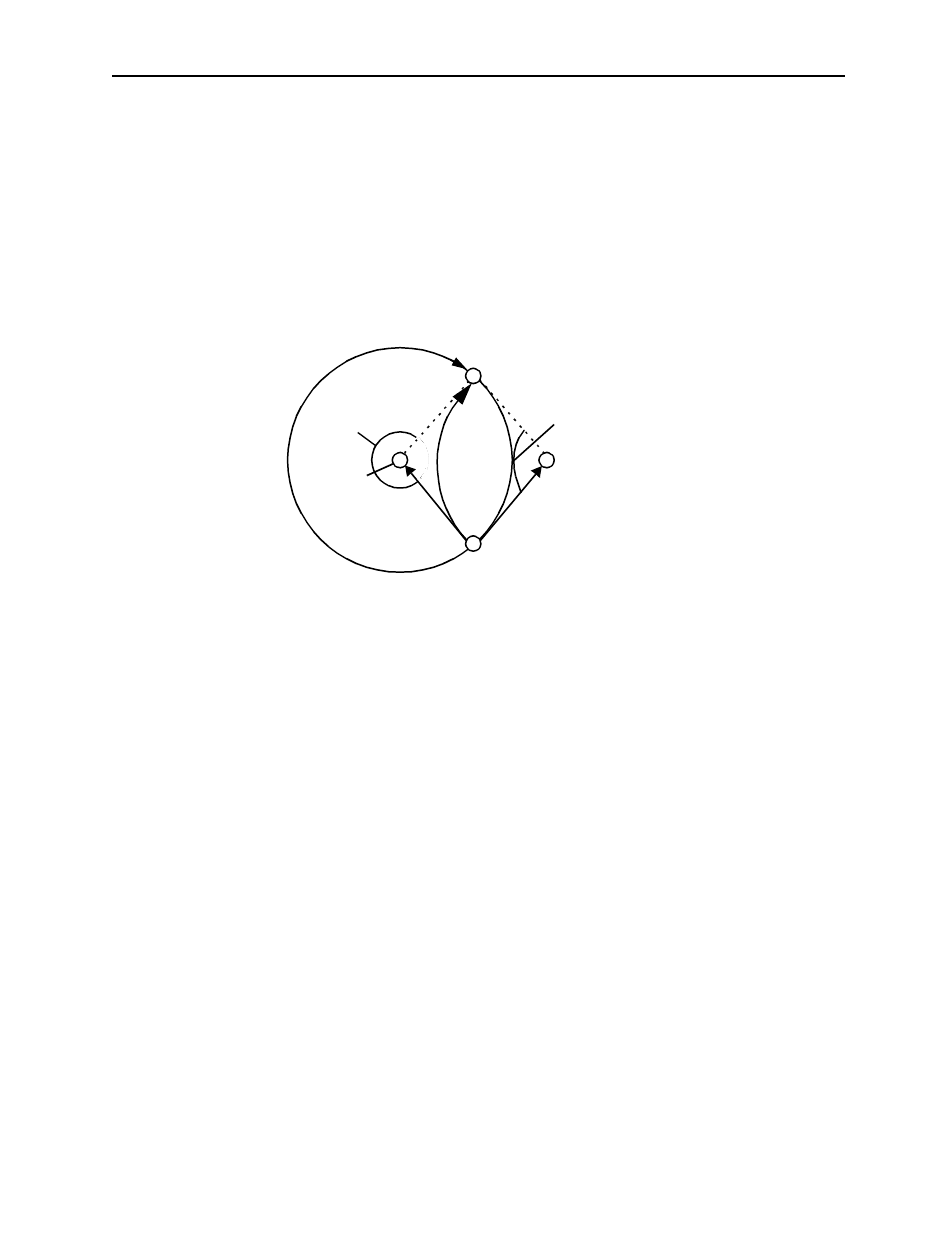
• The circular arc can be designated by the radius value (R) instead of the center
position. The circular interpolation at this point is shown in Figure 9.
In the command of MCW [axis1]—[axis2]—R—;
When R>0, circular interpolation is smaller than circular angle 180
°
When R<0, circular interpolation is greater than circular angle 180
°
Note: When R=0, an alarm occurs.
• Before designating the circular interpolation, a plane must be designated to avoid an
alarm. If there is no new designation, the last plane designated is used.
• The interpolation feed speed is also called F command. It is designated by the speed
designation (F) or speed command (%) (IFP). The F command designated in the
previous block is used. An alarm occurs if the interpolation command is not designated
by the F command.
• The tangential velocity speed of the designated circular arc is equal to the F command
value. However, an alarm occurs when designating an F command that exceeds the
limited value set up in the maximum interpolation feed speed.
Center
Greater than 180
°
R
(Negative)
R
(Positive)
Current position
End position
Smaller than 180
°
Center
Figure 2.10: Circular Interpolation