Yaskawa MotionSuite Series Machine Controller Programming Manual User Manual
Page 44
MotionSuite™ Series Machine Controller Programming Manual
Chapter 2: Motion Commands
2-3
The move path based on the MOV command is illustrated in the following figure:
• The designated position is set up as either absolute or incremental in previously
commanded ABS/INC* mode:
Absolute (ABS) mode:
Target position
Incremental (INC) mode:
Incremental amount from the current position
* ABS/INC command: Command uses either absolute value or incremental value to
handle the coordinate term, which is called “modal group command.” Once designated,
it is enabled until the command is switched.
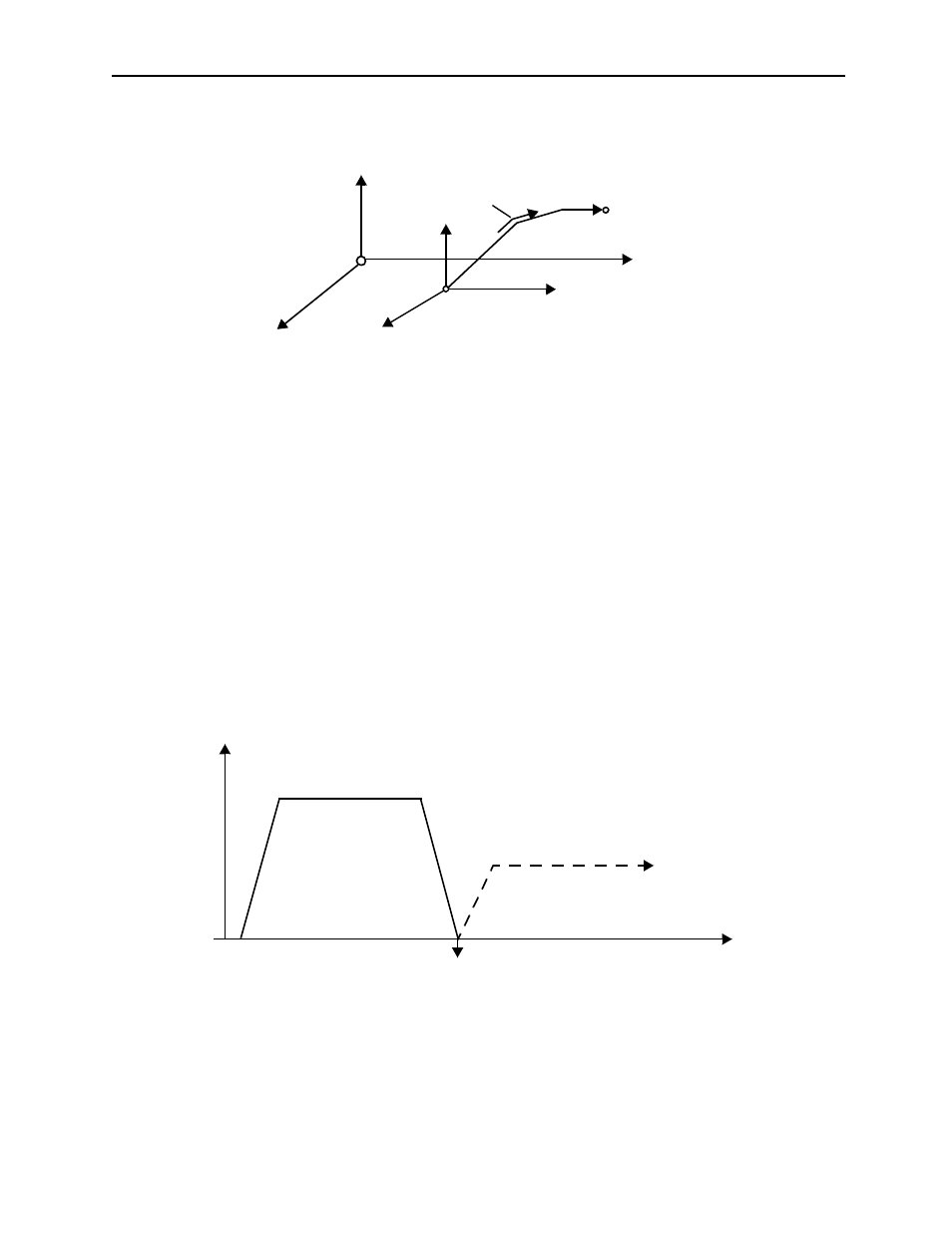
• For the axial motion based on the MOV command, execute an in-position check that
verifies whether the axial motion based on the MOV command has entered the
positioning completion range. After the in-position check, execute the next moving
command block. The following figure illustrates the motion of the in-position check.
• Fast feed speed is set up in parameter 30 “Fast feed speed (OLxx22)” of each axis.
Override can be set in a range of 0~327.67% to the fast feed speed. Use parameter 35
“Override (OWxx2C)” to set up the override in each axis.
axis3
axis2
axis1
axis2
axis3
axis1
Current position
End position
Positioning motion
Each axis is moving independently
by feed speed
Figure 2.1: Move Path Based on the MOV Command
Entering the positioning completion range = In-position check completion
Figure 2.2: In-position Check Motion
v
t
Block designated by positioning
Block designated by next moving command